16路舵机控制芯片lu9685使用技巧
刚刚接触机器人编程,我对双足机器人的行走的姿势非常感兴趣,但我对硬件知之不多。写好的程序常常因为电流过大和舵机位置不准而崩溃,有时也因为误差过大伤透了脑筋,而为了校正步法我不得不写大量的测试代码来不停的旋转调整舵机位置,这实在是一个痛苦的工作。特别是对于六个以上乃到十几舵机的场合,我觉得这不是人干的工作,有时因为舵在工位上不好测试,我还需要把他拆下来写个程序单独校正。
今天终于找到了一个好办法,我使用LU9685芯片解决了这个问题。LU9685是PCA9685的替代品,听说可以完全替代PCA9685,我没有用过PCA9685不知道,但比PCA9685多了一个串口功能。这个串口功能真的不错,我接上一个蓝牙,借助手机的蓝牙app就可以调试舵机,事实上也可以写一个APP或者使用电脑app,就可以控制舵机到任何位置,这使我不需要写程序来测试舵机是不是正常,利用手机就把测试舵机,并到舵机校正到合适的角度。
LU9685缺点也很明显,
1.没有啥资料,用法需要参考pca9685.
2.引脚也没有啥说明,有好几个电源接口,我用万用表测试后才明白接线方式。DVCC是他的主板电源,V+和侧边的另一个V+是他的舵机电源,一般一个两个舵机,DVCC边上的V+就可以,如果多个舵机,需要接侧边的V+
3没有电源提示灯,上电后看起来没啥反应,我一度以为板子坏了。这比较依赖电源的指示灯,如果接错了,电源指示灯不亮或者不稳,要赶快断开。
4发送串口命令没有回应,如果你的接线不对或者指令不对的话,舵机也不会有反应。
5它没有降压功能,舵机需要的电压,必须在使用相对电压的电源,防止烧板子和舵机。
唯一的优点,他足够便宜,而且支持串口,这使我们可以接一个蓝牙使用手机控制。
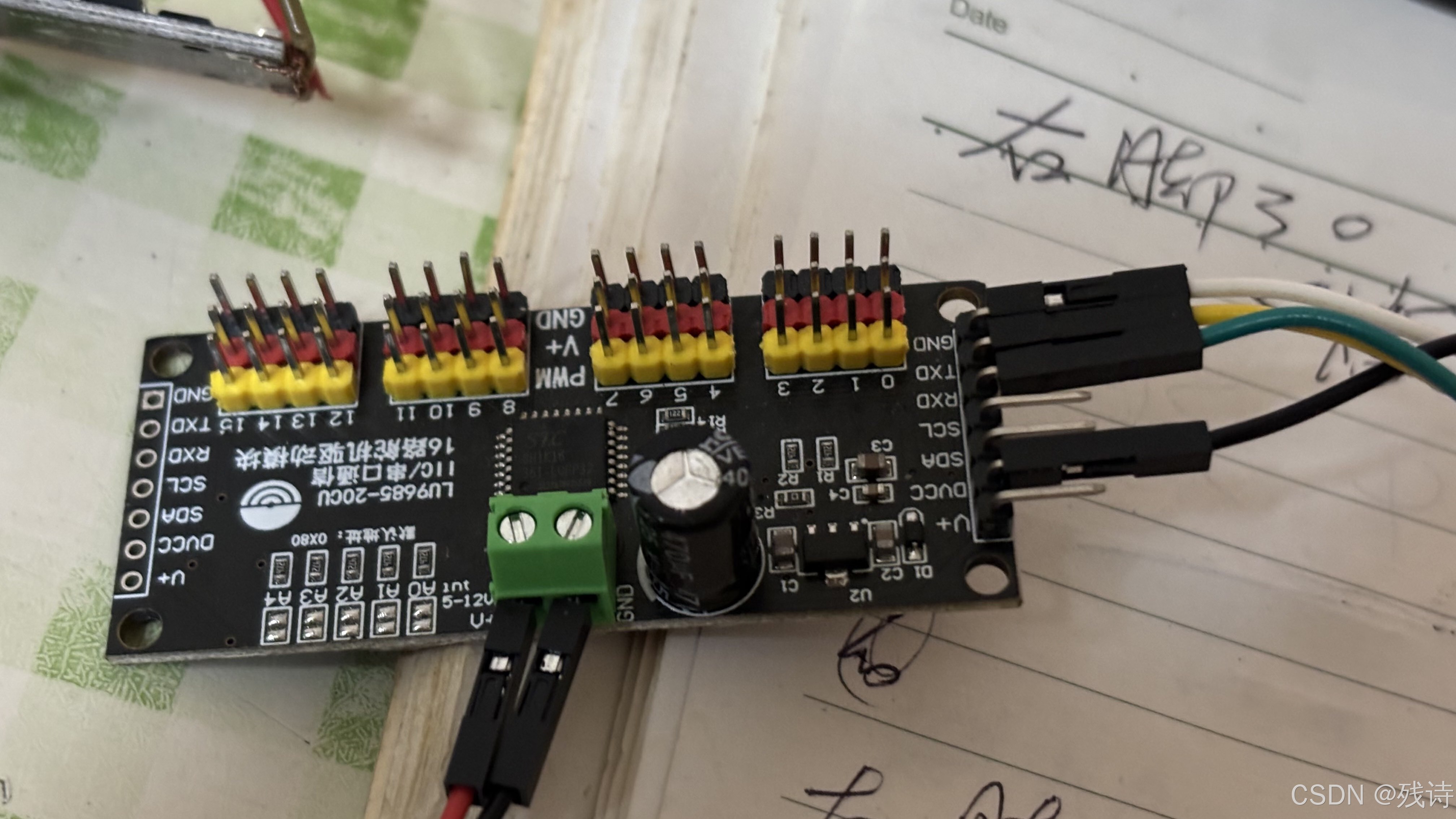
接线,下边红黑的是舵机电源线,红正黑负,由5V稳压电源供电,右边黑白是板子电源线,黑正白负,中间是蓝牙线RX,TX,还有两个引线是I2C。
手机APP

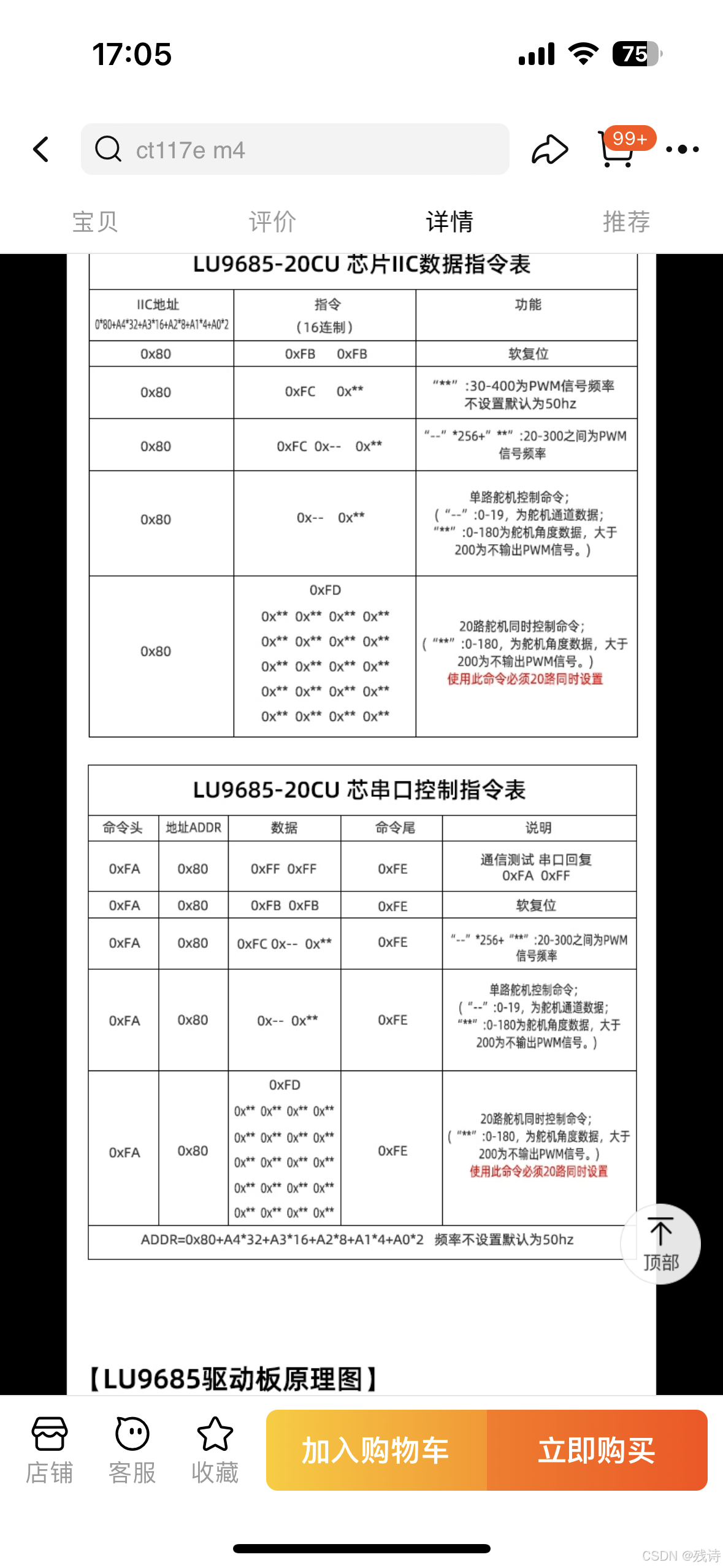
指令