Dalvik虚拟机在调用一个成员函数的时候,如果发现该成员函数是一个JNI方法,那么就会直接跳到它的地址去执行。也就是说,JNI方法是直接在本地操作系统上执行的,而不是由Dalvik虚拟机解释器执行。由此也可看出,JNI方法是Android应用程序与本地操作系统直接进行通信的一个手段。在本文中,我们就详细分析JNI方法的注册过程。
先从System.loadLibrary开始吧…
libcore\luni\src\main\java\java\lang\System.java
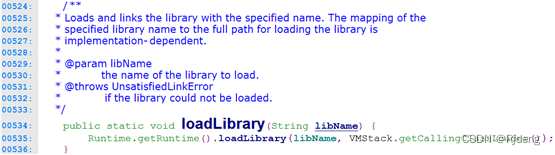
System类的成员函数loadLibrary接下来就再通过运行时类Runtime的成员函数loadLibrary来加载名称为libName的so文件,接下来我们就继续分析它的实现。
frameworks\native\libs\utils\Runtime.java
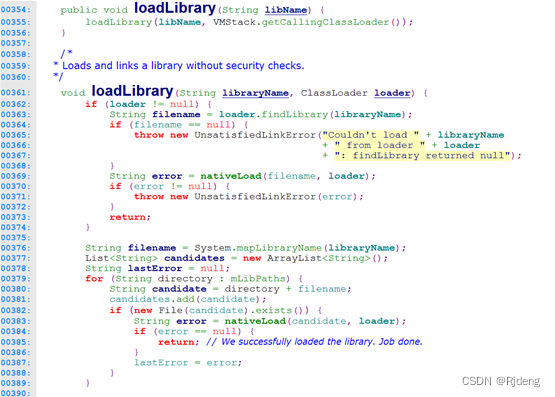
参数libraryName只是描述要加载的so文件的部分名称,它的完整名称需要根据本地操作系统的特证来确定。由于目前Android系统都是属于Linux系统,而在Linux系统中,so文件的命名规范通常就是lib.so的形式,这是通过调用System类的静态成员函数mapLibraryName来获得的。
上面所获得的libnanosleep.so文件的名称仍然还不够完整,因为它没有包含绝对路径。在这种情况下,我们是无法将它加载到Dalvik虚拟机中去的。当参数loader的值不等于null的时候,Runtime类的成员函数loadLibrary就会调用它的成员函数findLibrary来它的so文件目录中寻找是否有一外名称为“libnanosleep.so”。如果存在的话,那么就会返回该libnanosleep.so文件的绝对路径。有了libnanosleep.so文件的绝对路径之后,就可以调用Runtime类的另外一个成员函数nativeLoad来将它加载到当前进程的Dalvik虚拟机中。注意,将参数libraryName转换为lib.so的完整形式,以及获得该so文件的绝对路径,都是由参数loader所描述的一个类加载器的成员函数findLibrary来完成的。
另一方面,如果参数loader的值等于null,那么就表示当前要加载的so文件要在系统范围的so文件目录查找。这些系统范围的so文件目录保存在Runtime类的成员变量mLibPaths所描述的一个String数组中。通过依次检查这些目录是否存在与参数libraryName对应的so文件,就可以确定参数libraryName所指定加载的so文件是否是一个合法的so文件。如果合法的话,那么同样会调用Runtime类的另外一个成员函数nativeLoad来将它加载到当前进程的Dalvik虚拟机中。注意,这里在检查参数libraryName所表示的so文件是否存在于系统范围的so文件目录之前,同样要将它转换为lib.so的形式,这同样也是通过调用System类的静态成员函数mapLibraryName来完成的。
如果最后无法在指定的APK或者系统范围的so文件目录中找到由参数libraryName所描述的so文件,或者找到了该so文件,但是在加载该so文件的过程中出现错误,那么Runtime类的成员函数loadLibrary都会抛出一个类型为UnsatisfiedLinkError的异常。
由于加载参数libraryName所描述的so文件是由Runtime类的成员函数nativeLoad来实现的,因此,接下来我们继续分析它的实现。
frameworks\native\libs\utils\Runtime.java
 Runtime类的成员函数nativeLoad是一个JNI方法。由于该JNI方法是属于Java核心类Runtime的,也就是说,它在Dalvik虚拟机启动的时候就已经在内部注册过了,因此,这时候我们可以直接调用它注册其它的JNI方法,也就是so文件filename里面所指定的JNI方法。Dalvik虚拟机在启动过程中注册Java核心类的操作,具体可以参考前面Dalvik虚拟机的启动过程分析一文。
Runtime类的成员函数nativeLoad是一个JNI方法。由于该JNI方法是属于Java核心类Runtime的,也就是说,它在Dalvik虚拟机启动的时候就已经在内部注册过了,因此,这时候我们可以直接调用它注册其它的JNI方法,也就是so文件filename里面所指定的JNI方法。Dalvik虚拟机在启动过程中注册Java核心类的操作,具体可以参考前面Dalvik虚拟机的启动过程分析一文。
Runtime类的成员函数nativeLoad在C++层对应的函数为Dalvik_java_lang_Runtime_nativeLoad,如下所示:
dalvik\vm\ java_lang_Runtime.cpp
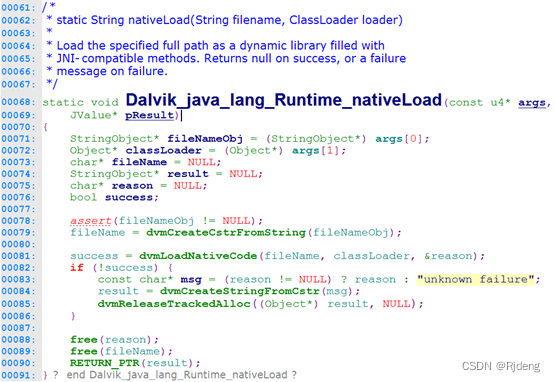
参数args[0]保存的是一个Java层的String对象,这个String对象描述的就是要加载的so文件,函数Dalvik_java_lang_Runtime_nativeLoad首先是调有函数dvmCreateCstrFromString来将它转换成一个C++层的字符串fileName,然后再调用函数dvmLoadNativeCode来执行加载so文件的操作。
接下来,我们就继续分函数dvmLoadNativeCode的实现,以便可以了解一个so文件的加载过程。
dalvik\vm\ Native.cpp
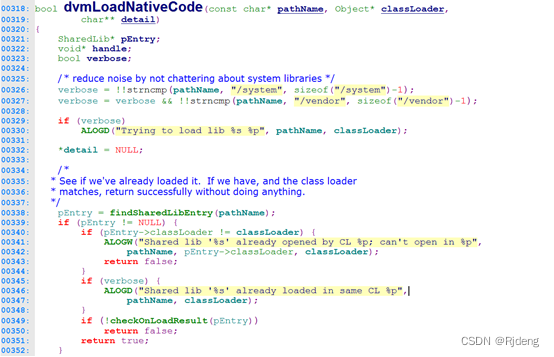
函数dvmLoadNativeCode首先是检查参数pathName所指定的so文件是否已经加载过了,这是通过调用函数findSharedLibEntry来实现的。如果已经加载过,那么就可以获得一个SharedLib对象pEntry。这个SharedLib对象pEntry描述了有关参数pathName所指定的so文件的加载信息,例如,上次用来加载它的类加载器和上次的加载结果。如果上次用来加载它的类加载器不等于当前所使用的类加载器,或者上次没有加载成功,那么函数dvmLoadNativeCode就回直接返回false给调用者,表示不能在当前进程中加载参数pathName所描述的so文件。
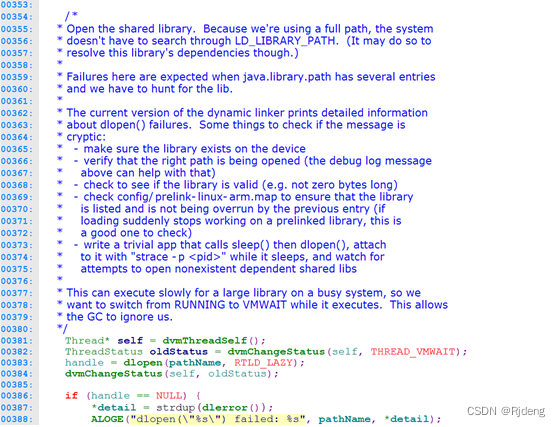
我们假设参数pathName所指定的so文件还没有被加载过,这时候函数dvmLoadNativeCode就会先调用dlopen来在当前进程中加载它,并且将获得的句柄保存在变量handle中,接着再创建一个SharedLib对象pNewEntry来描述它的加载信息。这个SharedLib对象pNewEntry还会通过函数addSharedLibEntry被缓存起来,以便可以知道当前进程都加载了哪些so文件。
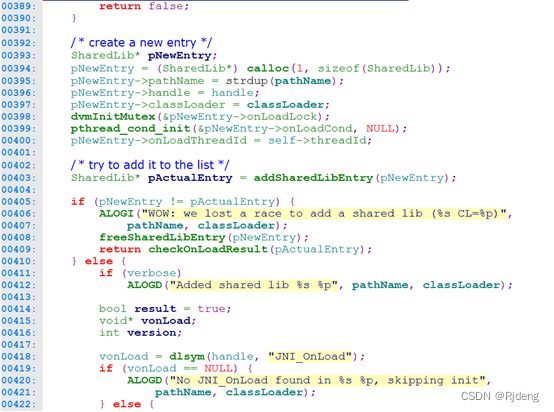
注意,在调用函数addSharedLibEntry来缓存新创建的SharedLib对象pNewEntry的时候,如果得到的返回值pActualEntry指向的不是SharedLib对象pNewEntry,那么就表示另外一个线程也正在加载参数pathName所指定的so文件,并且比当前线程提前加载完成。在这种情况下,函数addSharedLibEntry就什么也不用做而直接返回了。否则的话,函数addSharedLibEntry就要继续负责调用前面所加载的so文件中的一个指定的函数来注册它里面的JNI方法。
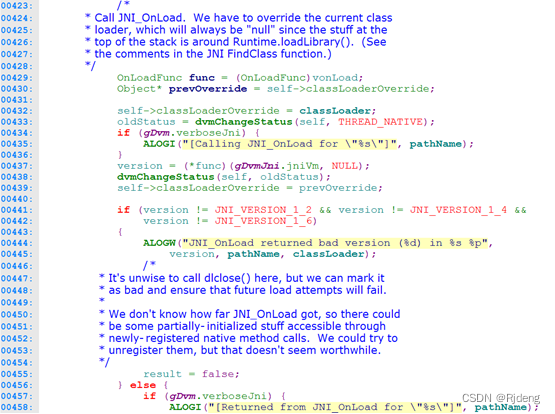
这个指定的函数的名称为“JNI_OnLoad”,也就是说,每一个用来实现JNI方法的so文件都应该定义有一个名称为“JNI_OnLoad”的函数,并且这个函数的原型为:
jint JNI_OnLoad(JavaVM* vm, void* reserved)
函数dvmLoadNativeCode通过调用函数dlsym就可以获得在前面加载的so中名称为“JNI_OnLoad”的函数的地址,最终保存在函数指针func中。有了这个函数指针之后,我们就可以直接调用它来执行注册JNI方法的操作了。注意,在调用该JNI_OnLoad函数时,第一个要传递进行的参数是一个JavaVM对象,这个JavaVM对象描述的是在当前进程中运行的Dalvik虚拟机,第二个要传递的参数可以设置为NULL,这是保留给以后使用的。
从前面Dalvik虚拟机的启动过程分析一文可以知道,在当前进程所运行的Dalvik虚拟机实例是通过全局变量gDvm所描述的一个DvmGlobals结构体的成员变量vmList来描述的,因此,我们就可以将它传递在前面加载的so中名称中定义的JNI_OnLoad函数。注意,定义在该so文件中的JNI_OnLoad函数一旦执行成功,它的返回值就必须等于JNI_VERSION_1_2、JNI_VERSION_1_4或者JNI_VERSION_1_6,用来表示所注册的JNI方法的版本。
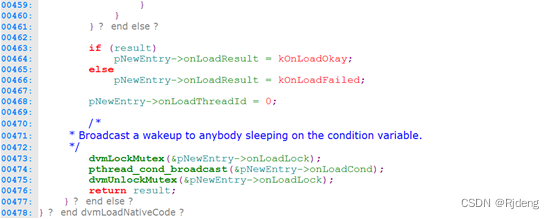
最后,函数dvmLoadNativeCode根据上述的JNI_OnLoad函数的执行成功与否,将前面所创建的一个SharedLib对象pNewEntry的成员变量onLoadResult设置为kOnLoadOkay或者kOnLoadFailed,这样就可以记录参数pathName所指定的so文件是否是加载成功的,也就是它是否成功地注册了其内部的JNI方法。
在我们这个情景中,参数pathName所指定的so文件为libnanosleep.so,接下来我们就继续分析它的函数JNI_OnLoad的实现,以便可以发解定义在它里面的JNI方法的注册过程。
定义在libnanosleep.so文件中的函数JNI_OnLoad的实现可以参考文章开始的部分。通过调用函数jniRegisterNativeMethods来实现的。因此,接下来我们就继续分析函数jniRegisterNativeMethods的实现。
Libnativehelper\ JNIHelp.cpp
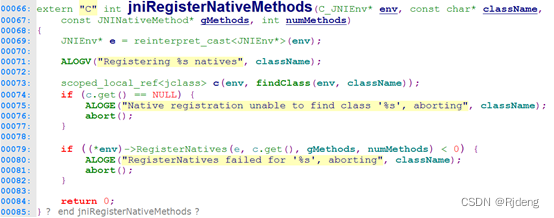
参数env所指向的一个JNIEnv结构体,通过调用这个JNIEnv结构体可以获得参数className所描述的一个类。这个类就是要注册JNI的类,而它所要注册的JNI就是由参数gMethods来描述的。
注册参数gMethods所描述的JNI方法是通过调用env所指向的一个JNIEnv结构体的成员函数RegisterNatives来实现的,因此,接下来我们就继续分析它的实现。
dalvik\vm\ Jni.cpp
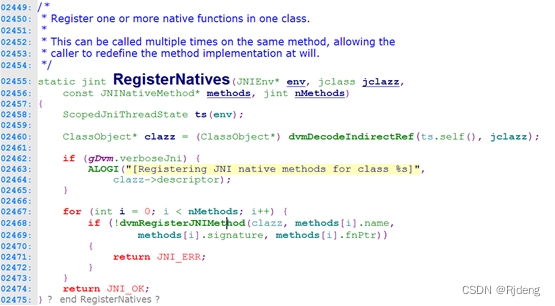
参数jclazz描述的是要注册JNI方法的类,而参数methods描述的是要注册的一组JNI方法,这个组JNI方法的个数由参数nMethods来描述。
函数RegisterNatives首先是调用函数dvmDecodeIndirectRef来获得要注册JNI方法的类对象,接着再通过一个for循环来依次调用函数dvmRegisterJNIMethod注册参数methods描述所描述的每一个JNI方法。注意,每一个JNI方法都由名称、签名和地址来描述。
接下来,我们就继续分析函数dvmRegisterJNIMethod的实现。
dalvik\vm\ Jni.cpp
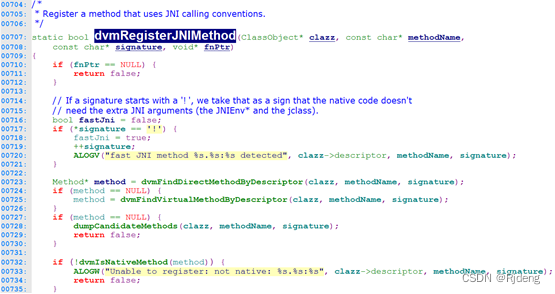
一个JNI方法并不是直接被调用的,而是通过由Dalvik虚拟机间接地调用,这个用来间接调用JNI方法的函数就称为一个Bridge。这些Bridage函数在真正调用JNI方法之前,会执行一些通用的初始化工作。例如,会将当前线程的状态设置为NATIVE,因为它即将要执行一个Native函数。又如,会为即将要被调用的JNI方法准备好前面两个参数,第一个参数是一个JNIEnv对象,用来描述当前线程的Java环境,通过它可以访问反过来访问Java代码和Java对象,第二个参数是一个jobject对象,用来描述当前正在执行JNI方法的Java对象。
这些Bridage函数实际上仍然不是直接调用地调用JNI方法的,这是因为Dalvik虚拟机是可以运行在各种不同的平台之上,而每一种平台可能都定义有自己的一套函数调用规范,也就是所谓的ABI(Application Binary Interface),这是一个API(Application Programming Interface)不同的概念。ABI是在二进制级别上定义的一套函数调用规范,例如参数是通过寄存器来传递还是堆栈来传递,而API定义是一个应用程序编程接口规范。换句话说,API定义了源代码和库之间的接口,因此同样的代码可以在支持这个API的任何系统中编译 ,而ABI允许编译好的目标代码在使用兼容ABI的系统中无需改动就能运行。
为了使得运行在不同平台上的Dalvik虚拟机能够以统一的方法来调用JNI方法,这些Bridage函数使用了一个libffi库,它的源代码位于external/libffi目录中。Libffi是一个开源项目,用于高级语言之间的相互调用的处理,它的实现机制可以进一步参考http://www.sourceware.org/libffi/。
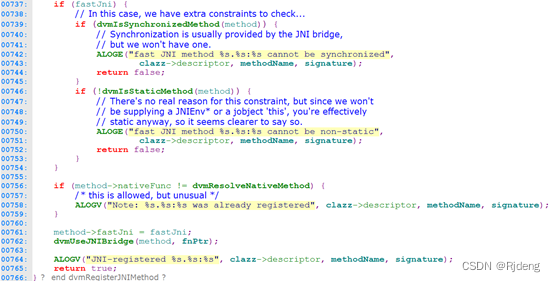
回到函数dvmUseJNIBridge中,它主要就是根据Dalvik虚拟机的启动选项来为即将要注册的JNI选择一个合适的Bridge函数。如果我们在Dalvik虚拟机启动的时候,通过-Xjnitrace选项来指定了要跟踪参数method所描述的JNI方法,那么函数dvmUseJNIBridge为该JNI方法选择的Bridge函数就为dvmTraceCallJNIMethod,否则的话,就再通过另外一个函数dvmSelectJNIBridge来进一步选择一个合适的Bridge函数。选择好Bridge函数之后,函数dvmUseJNIBridge最终就调用函数dvmSetNativeFunc来执行真正的JNI方法注册操作。接着再分析函数dvmSetNativeFunc的实现。
dalvik\vm\oo\ Class.cpp

参数method表示要注册JNI方法的Java类成员函数,参数func表示JNI方法的Bridge函数,参数insns表示要注册的JNI方法的函数地址。
当参数insns的值不等于NULL的时候,函数dvmSetNativeFunc就分别将参数insns和func的值分别保存在参数method所指向的一个Method对象的成员变量insns和nativeFunc中,而当insns的值等于NULL的时候,函数dvmSetNativeFunc就只将参数func的值保存在参数method所指向的一个Method对象成员变量nativeFunc中。
假设在前面的Step 11中选择的Bridge函数为dvmCallJNIMethod_general,并且结合前面Dalvik虚拟机的运行过程分析一文,我们就可以得到Dalvik虚拟机在运行过程中调用JNI方法的过程:
- 调用函数dvmCallJNIMethod_general,执行一些必要的准备工作;
- 函数dvmCallJNIMethod_general再调用函数dvmPlatformInvoke来以统一的方式来调用对应的JNI方法;
- 函数dvmPlatformInvoke通过libffi库来调用对应的JNI方法,以屏蔽Dalvik虚拟机运行在不同目标平台的细节。
至此,我们就分析完成Dalvik虚拟机JNI方法的注册过程了。这样,我们就打通了Java代码和Native代码之间的道路。实际上,很多Java和Android核心类的功能都是通过本地操作系统提供的系统调用来完成的,例如,Zygote类的成员函数forkAndSpecialize最终是通过Linux系统调用fork来创建一个Android应用程序进程的,又如,Thread类的成员函数start最终是通过pthread线程库函数pthread_create来创建一个Android应用程序线程的。