STM32H750时钟频率和功耗和RTC功能测试
- 📌相关篇《STM32H750片外QSPI启动配置简要》
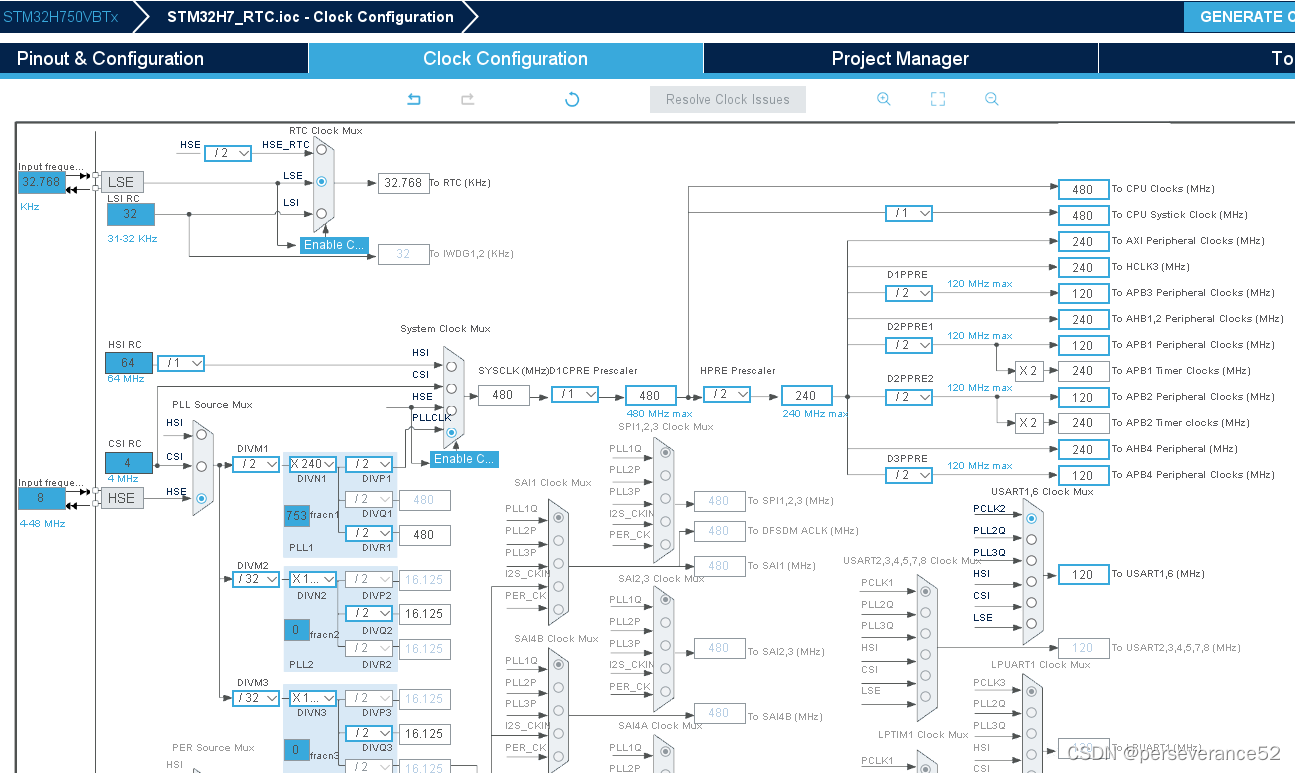
✨在使用STM32CubeMX修改STM32H750时钟树参数时,如果使用软件自动求解,这是一个非常耗时的操作,有时候还不一定成功,还是推荐使用手动方式进行配置,这一点和STM32其他系列不同,像STM32F1系列,输入频率参数回车确认后,自动求解很快就自动配置完成了。可能和时钟配置参数的复杂度有关。
🔰STM32H750时钟频率和功耗粗略统计对比
- 🔖以下是在的单片机正常运行模式下的测试数据。(以个人自制的STM32H750核心板测试为例,数据不代表所有实际使用的STM32H750的运行状态能耗)
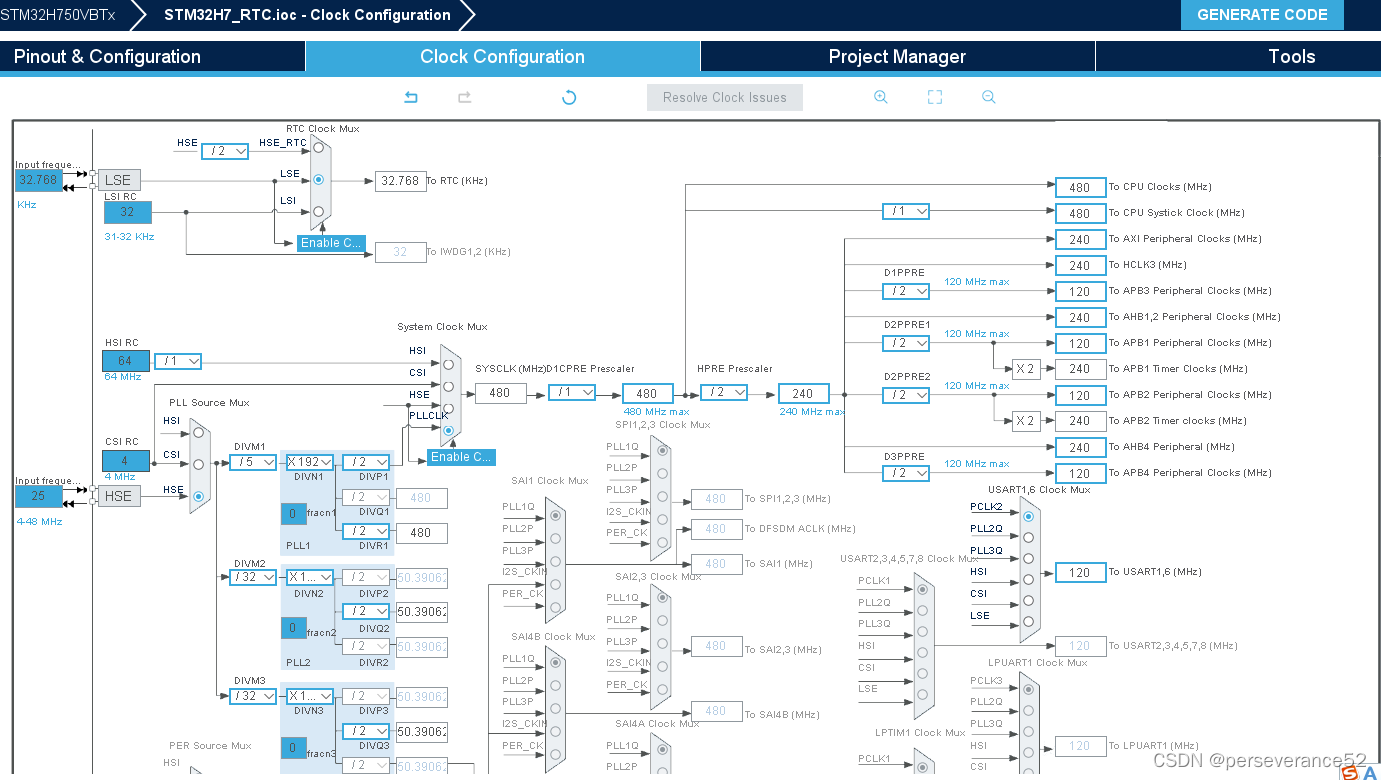
- 🌿外部晶振25MHz , 480MHz主频,电流220mA,1.1w,芯片发热很大
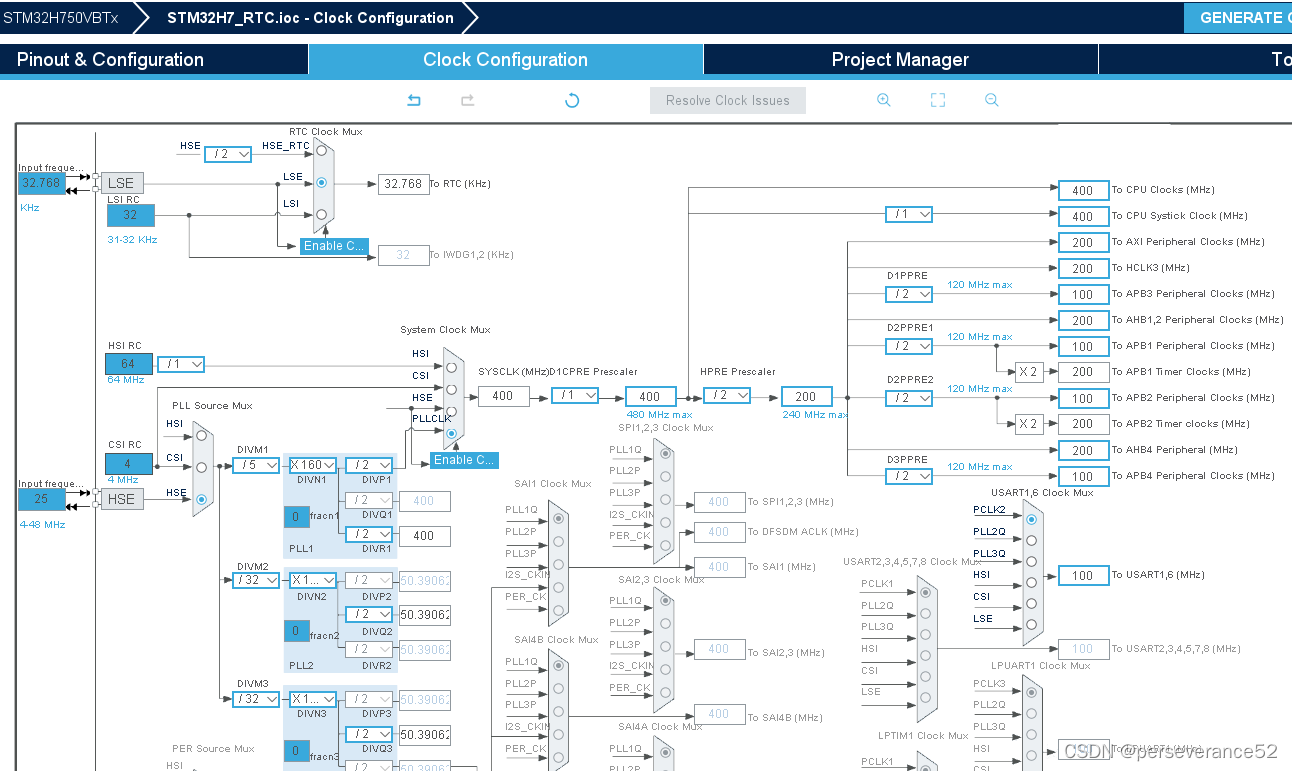
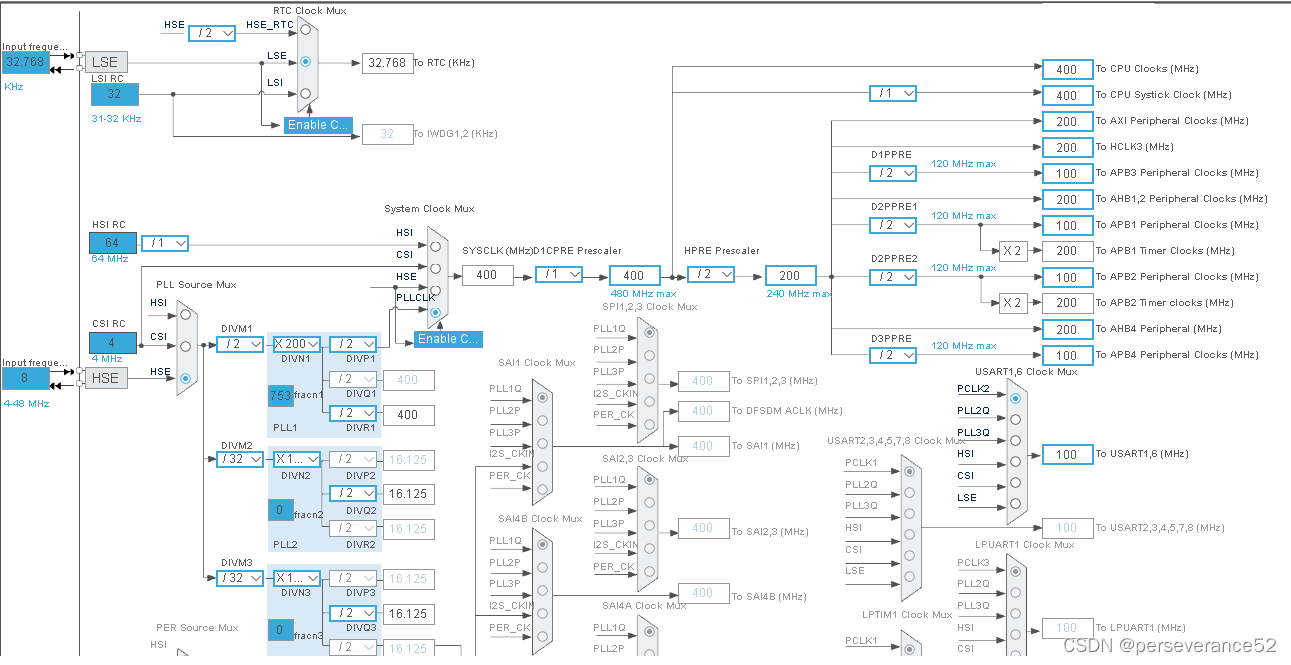
- 🌿外部晶振 25MHz,400MHz,电流164mA,0.82w,芯片发热比较大
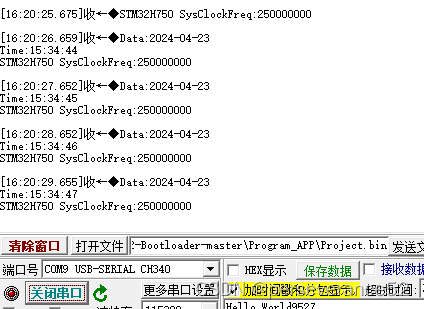
- 🌿 外部晶振25MHz, 250MHz,电流75mA,0.4w,芯片稍微发热
- 功耗主要源头和主频关系非常大,与是否使能的外设多少,测试没有明显的影响。
- 如果跑满单片机主频(480MHz),长期运行,最好贴个散热片辅助散热,供电方面,至少500mA或以上输出能力的电源。
- 🎉STM32H750工程编译器推荐使用AC6版本的编译器,编译速度会比AC5版本快很多,在STM32H7上,这一点体现尤为明显。
📙时钟频率配置参数
- 🔧25MHz外部晶振,配置480MHz
/*** @brief System Clock Configuration* @retval None*/
void SystemClock_Config(void)
{RCC_OscInitTypeDef RCC_OscInitStruct = {0};RCC_ClkInitTypeDef RCC_ClkInitStruct = {0};/** Supply configuration update enable*/HAL_PWREx_ConfigSupply(PWR_LDO_SUPPLY);/** Configure the main internal regulator output voltage*/__HAL_PWR_VOLTAGESCALING_CONFIG(PWR_REGULATOR_VOLTAGE_SCALE1);while(!__HAL_PWR_GET_FLAG(PWR_FLAG_VOSRDY)) {}__HAL_RCC_SYSCFG_CLK_ENABLE();__HAL_PWR_VOLTAGESCALING_CONFIG(PWR_REGULATOR_VOLTAGE_SCALE0);while(!__HAL_PWR_GET_FLAG(PWR_FLAG_VOSRDY)) {}/** Configure LSE Drive Capability*/HAL_PWR_EnableBkUpAccess();__HAL_RCC_LSEDRIVE_CONFIG(RCC_LSEDRIVE_LOW);/** Initializes the RCC Oscillators according to the specified parameters* in the RCC_OscInitTypeDef structure.*/RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_HSE|RCC_OSCILLATORTYPE_LSE;RCC_OscInitStruct.HSEState = RCC_HSE_ON;RCC_OscInitStruct.LSEState = RCC_LSE_ON;RCC_OscInitStruct.PLL.PLLState = RCC_PLL_ON;RCC_OscInitStruct.PLL.PLLSource = RCC_PLLSOURCE_HSE;RCC_OscInitStruct.PLL.PLLM = 5;RCC_OscInitStruct.PLL.PLLN = 192;RCC_OscInitStruct.PLL.PLLP = 2;RCC_OscInitStruct.PLL.PLLQ = 2;RCC_OscInitStruct.PLL.PLLR = 2;RCC_OscInitStruct.PLL.PLLRGE = RCC_PLL1VCIRANGE_2;RCC_OscInitStruct.PLL.PLLVCOSEL = RCC_PLL1VCOWIDE;RCC_OscInitStruct.PLL.PLLFRACN = 0;if (HAL_RCC_OscConfig(&RCC_OscInitStruct) != HAL_OK){Error_Handler();}/** Initializes the CPU, AHB and APB buses clocks*/RCC_ClkInitStruct.ClockType = RCC_CLOCKTYPE_HCLK|RCC_CLOCKTYPE_SYSCLK|RCC_CLOCKTYPE_PCLK1|RCC_CLOCKTYPE_PCLK2|RCC_CLOCKTYPE_D3PCLK1|RCC_CLOCKTYPE_D1PCLK1;RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_PLLCLK;RCC_ClkInitStruct.SYSCLKDivider = RCC_SYSCLK_DIV1;RCC_ClkInitStruct.AHBCLKDivider = RCC_HCLK_DIV2;RCC_ClkInitStruct.APB3CLKDivider = RCC_APB3_DIV2;RCC_ClkInitStruct.APB1CLKDivider = RCC_APB1_DIV2;RCC_ClkInitStruct.APB2CLKDivider = RCC_APB2_DIV2;RCC_ClkInitStruct.APB4CLKDivider = RCC_APB4_DIV2;if (HAL_RCC_ClockConfig(&RCC_ClkInitStruct, FLASH_LATENCY_4) != HAL_OK){Error_Handler();}
}
- 🔧25MHz外部晶振,配置400MHz
/*** @brief System Clock Configuration* @retval None*/
void SystemClock_Config(void)
{RCC_OscInitTypeDef RCC_OscInitStruct = {0};RCC_ClkInitTypeDef RCC_ClkInitStruct = {0};/** Supply configuration update enable*/HAL_PWREx_ConfigSupply(PWR_LDO_SUPPLY);/** Configure the main internal regulator output voltage*/__HAL_PWR_VOLTAGESCALING_CONFIG(PWR_REGULATOR_VOLTAGE_SCALE1);while(!__HAL_PWR_GET_FLAG(PWR_FLAG_VOSRDY)) {}/** Configure LSE Drive Capability*/HAL_PWR_EnableBkUpAccess();__HAL_RCC_LSEDRIVE_CONFIG(RCC_LSEDRIVE_LOW);/** Initializes the RCC Oscillators according to the specified parameters* in the RCC_OscInitTypeDef structure.*/RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_HSE|RCC_OSCILLATORTYPE_LSE;RCC_OscInitStruct.HSEState = RCC_HSE_ON;RCC_OscInitStruct.LSEState = RCC_LSE_ON;RCC_OscInitStruct.PLL.PLLState = RCC_PLL_ON;RCC_OscInitStruct.PLL.PLLSource = RCC_PLLSOURCE_HSE;RCC_OscInitStruct.PLL.PLLM = 5;RCC_OscInitStruct.PLL.PLLN = 160;RCC_OscInitStruct.PLL.PLLP = 2;RCC_OscInitStruct.PLL.PLLQ = 2;RCC_OscInitStruct.PLL.PLLR = 2;RCC_OscInitStruct.PLL.PLLRGE = RCC_PLL1VCIRANGE_2;RCC_OscInitStruct.PLL.PLLVCOSEL = RCC_PLL1VCOWIDE;RCC_OscInitStruct.PLL.PLLFRACN = 0;if (HAL_RCC_OscConfig(&RCC_OscInitStruct) != HAL_OK){Error_Handler();}/** Initializes the CPU, AHB and APB buses clocks*/RCC_ClkInitStruct.ClockType = RCC_CLOCKTYPE_HCLK|RCC_CLOCKTYPE_SYSCLK|RCC_CLOCKTYPE_PCLK1|RCC_CLOCKTYPE_PCLK2|RCC_CLOCKTYPE_D3PCLK1|RCC_CLOCKTYPE_D1PCLK1;RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_PLLCLK;RCC_ClkInitStruct.SYSCLKDivider = RCC_SYSCLK_DIV1;RCC_ClkInitStruct.AHBCLKDivider = RCC_HCLK_DIV2;RCC_ClkInitStruct.APB3CLKDivider = RCC_APB3_DIV2;RCC_ClkInitStruct.APB1CLKDivider = RCC_APB1_DIV2;RCC_ClkInitStruct.APB2CLKDivider = RCC_APB2_DIV2;RCC_ClkInitStruct.APB4CLKDivider = RCC_APB4_DIV2;if (HAL_RCC_ClockConfig(&RCC_ClkInitStruct, FLASH_LATENCY_2) != HAL_OK){Error_Handler();}
}- 🔧8MHz外部晶振,配置480MHz
/*** @brief System Clock Configuration* @retval None*/
void SystemClock_Config(void)
{RCC_OscInitTypeDef RCC_OscInitStruct = {0};RCC_ClkInitTypeDef RCC_ClkInitStruct = {0};/** Supply configuration update enable*/HAL_PWREx_ConfigSupply(PWR_LDO_SUPPLY);/** Configure the main internal regulator output voltage*/__HAL_PWR_VOLTAGESCALING_CONFIG(PWR_REGULATOR_VOLTAGE_SCALE1);while(!__HAL_PWR_GET_FLAG(PWR_FLAG_VOSRDY)) {}__HAL_RCC_SYSCFG_CLK_ENABLE();__HAL_PWR_VOLTAGESCALING_CONFIG(PWR_REGULATOR_VOLTAGE_SCALE0);while(!__HAL_PWR_GET_FLAG(PWR_FLAG_VOSRDY)) {}/** Configure LSE Drive Capability*/HAL_PWR_EnableBkUpAccess();__HAL_RCC_LSEDRIVE_CONFIG(RCC_LSEDRIVE_LOW);/** Initializes the RCC Oscillators according to the specified parameters* in the RCC_OscInitTypeDef structure.*/RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_HSE|RCC_OSCILLATORTYPE_LSE;RCC_OscInitStruct.HSEState = RCC_HSE_ON;RCC_OscInitStruct.LSEState = RCC_LSE_ON;RCC_OscInitStruct.PLL.PLLState = RCC_PLL_ON;RCC_OscInitStruct.PLL.PLLSource = RCC_PLLSOURCE_HSE;RCC_OscInitStruct.PLL.PLLM = 32;RCC_OscInitStruct.PLL.PLLN = 240;RCC_OscInitStruct.PLL.PLLP = 2;RCC_OscInitStruct.PLL.PLLQ = 2;RCC_OscInitStruct.PLL.PLLR = 2;RCC_OscInitStruct.PLL.PLLRGE = RCC_PLL1VCIRANGE_2;RCC_OscInitStruct.PLL.PLLVCOSEL = RCC_PLL1VCOWIDE;RCC_OscInitStruct.PLL.PLLFRACN = 7753;if (HAL_RCC_OscConfig(&RCC_OscInitStruct) != HAL_OK){Error_Handler();}/** Initializes the CPU, AHB and APB buses clocks*/RCC_ClkInitStruct.ClockType = RCC_CLOCKTYPE_HCLK|RCC_CLOCKTYPE_SYSCLK|RCC_CLOCKTYPE_PCLK1|RCC_CLOCKTYPE_PCLK2|RCC_CLOCKTYPE_D3PCLK1|RCC_CLOCKTYPE_D1PCLK1;RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_PLLCLK;RCC_ClkInitStruct.SYSCLKDivider = RCC_SYSCLK_DIV1;RCC_ClkInitStruct.AHBCLKDivider = RCC_HCLK_DIV2;RCC_ClkInitStruct.APB3CLKDivider = RCC_APB3_DIV2;RCC_ClkInitStruct.APB1CLKDivider = RCC_APB1_DIV2;RCC_ClkInitStruct.APB2CLKDivider = RCC_APB2_DIV2;RCC_ClkInitStruct.APB4CLKDivider = RCC_APB4_DIV2;if (HAL_RCC_ClockConfig(&RCC_ClkInitStruct, FLASH_LATENCY_4) != HAL_OK){Error_Handler();}
}- 🔧8MHz外部晶振,配置400MHz:
RCC_OscInitStruct.PLL.PLLN = 240;
📘RTC时钟功能
-
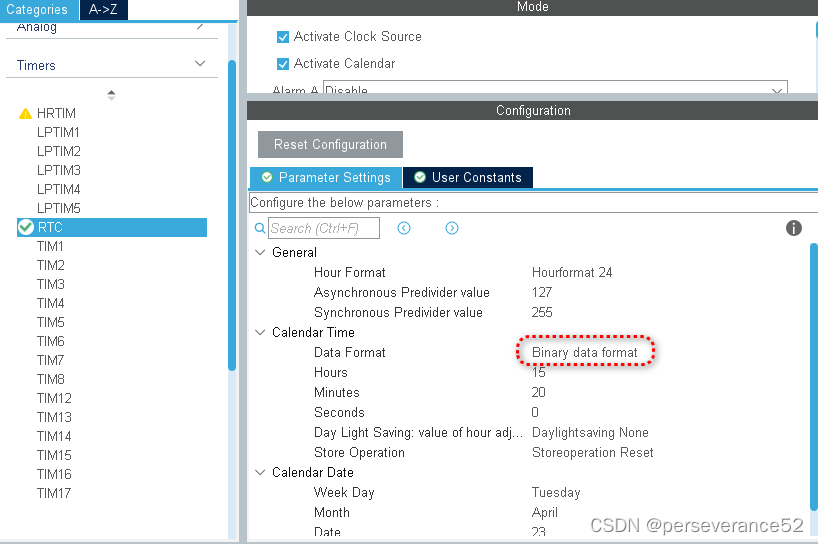
🔖在使能RTC日历,配置参数时,最好选择
RTC_FORMAT_BIN数据格式,在使用RTC_FORMAT_BCD数据格式,在读取数据就可以省去转换。
-
🌿如果使用RTC_FORMAT_BCD数据格式,转换为常规的十进制数参考代码:
RTC_HandleTypeDef hrtc;void HAL_RTC_MspInit(RTC_HandleTypeDef *hrtc)
{/* Enable RTC clock */__HAL_RCC_RTC_ENABLE();
}void RTC_BCDToDecimal(RTC_TimeTypeDef *sTime)
{sTime->Hours = ((sTime->Hours & 0xF0) >> 4) * 10 + (sTime->Hours & 0x0F);sTime->Minutes = ((sTime->Minutes & 0xF0) >> 4) * 10 + (sTime->Minutes & 0x0F);sTime->Seconds = ((sTime->Seconds & 0xF0) >> 4) * 10 + (sTime->Seconds & 0x0F);
}int main(void)
{RTC_TimeTypeDef sTime;/* Initialize RTC *//* Get RTC time */HAL_RTC_GetTime(&hrtc, &sTime, RTC_FORMAT_BCD);/* Convert BCD to decimal */RTC_BCDToDecimal(&sTime);/* Use sTime.Hours, sTime.Minutes, sTime.Seconds as decimal values */while (1){/* Application code */}
}📗RTC功能测试代码
- ✨个人采用的是外部flash运行程序,下载算法和程序地址,和常规片内运行的程序有所不同,这一点需要注意。
int main(void)
{/* USER CODE BEGIN 1 */uint8_t Rtctmp=0;RTC_DateTypeDef GetData = {0}; //获取日期结构体RTC_TimeTypeDef GetTime = {0}; //获取时间结构体SCB->VTOR = 0x90000000; /*设置中断向量表偏移地址 *//* USER CODE END 1 *//* Enable the CPU Cache *//* Enable I-Cache---------------------------------------------------------*/SCB_EnableICache();/* Enable D-Cache---------------------------------------------------------*/SCB_EnableDCache();/* MCU Configuration--------------------------------------------------------*//* Reset of all peripherals, Initializes the Flash interface and the Systick. */HAL_Init();/* USER CODE BEGIN Init *//* USER CODE END Init *//* Configure the system clock */SystemClock_Config();/* USER CODE BEGIN SysInit *//* USER CODE END SysInit *//* Initialize all configured peripherals */MX_GPIO_Init();MX_RTC_Init();MX_USART1_UART_Init();/* USER CODE BEGIN 2 *//* 使能 PWR 时钟 */
// __HAL_RCC_RTC_ENABLE();/* PWR_CR:DBF置1,使能RTC、RTC备份寄存器和备份SRAM的访问 */
// HAL_PWR_EnableBkUpAccess();/* 等待 RTC APB 寄存器同步 */
// HAL_RTC_WaitForSynchro(&hrtc);/* USER CODE END 2 *//* Infinite loop *//* USER CODE BEGIN WHILE */while(1) {/* USER CODE END WHILE *//* USER CODE BEGIN 3 */HAL_RTC_GetTime(&hrtc, &GetTime, RTC_FORMAT_BIN);//RTC_FORMAT_BCDHAL_RTC_GetDate(&hrtc, &GetData, RTC_FORMAT_BIN); //RTC_FORMAT_BIN// 每秒打印一次if(Rtctmp != GetTime.Seconds){printf("Data:%04d-%02d-%02d\r\n", 2000 + GetData.Year, GetData.Month, GetData.Date);printf("Time:%02d:%02d:%02d\r\n", GetTime.Hours, GetTime.Minutes, GetTime.Seconds);HAL_GPIO_TogglePin(LED1_GPIO_Port, LED1_Pin);printf("STM32H750 SysClockFreq:%d \r\n", SystemCoreClock);
// printf("STM32H750 SysClockFreq:%d \r\n", HAL_RCC_GetSysClockFreq());
// (void)RTC->DR;}Rtctmp = GetTime.Seconds;}/* USER CODE END 3 */
}
📒RTC不走时的相关原因分析
- 🌿在调用读取时间数据 接口函数时,需要同时一起调用时间和日期对应的函数:
HAL_RTC_GetTime(&hrtc, &GetTime, RTC_FORMAT_BIN);HAL_RTC_GetDate(&hrtc, &GetData, RTC_FORMAT_BIN);
- 🌿在调用上面两个接口函数时,注意第一个形参,该形参是rtc被初始化过的句柄,被定义在:
rtc.c中:
RTC_HandleTypeDef hrtc;/* RTC init function */
void MX_RTC_Init(void)
{/* USER CODE BEGIN RTC_Init 0 *//* USER CODE END RTC_Init 0 */RTC_TimeTypeDef sTime = {0};RTC_DateTypeDef DateToUpdate = {0};/* USER CODE BEGIN RTC_Init 1 *//* USER CODE END RTC_Init 1 *//** Initialize RTC Only*/hrtc.Instance = RTC;hrtc.Init.AsynchPrediv = RTC_AUTO_1_SECOND;hrtc.Init.OutPut = RTC_OUTPUTSOURCE_ALARM;if (HAL_RTC_Init(&hrtc) != HAL_OK){Error_Handler();}/* USER CODE BEGIN Check_RTC_BKUP *//* USER CODE END Check_RTC_BKUP *//** Initialize RTC and set the Time and Date*/sTime.Hours = 0x20;sTime.Minutes = 0x35;sTime.Seconds = 0x35;if (HAL_RTC_SetTime(&hrtc, &sTime, RTC_FORMAT_BCD) != HAL_OK){Error_Handler();}DateToUpdate.WeekDay = RTC_WEEKDAY_MONDAY;DateToUpdate.Month = RTC_MONTH_APRIL;DateToUpdate.Date = 0x22;DateToUpdate.Year = 0x24;if (HAL_RTC_SetDate(&hrtc, &DateToUpdate, RTC_FORMAT_BCD) != HAL_OK){Error_Handler();}/* USER CODE BEGIN RTC_Init 2 *//* USER CODE END RTC_Init 2 */}
- 🔖如果传递的是一个自己定义的一个rtc句柄(例如:
RTC_HandleTypeDef Rtc_Handle;),而未进行初始化操作,直接作为形参传入该句柄,将会导致不走时。- 🎉设置RTC时间的时候,用的那个变量作为句柄的,在调用读取时间信息的时候,也必须要使用相同的变量作为句柄来读取。
- 🔱如果必须要需使用自己定义的句柄,参考代码如下来做:
RTC_HandleTypeDef Rtc_Handle;/*** @brief 设置时间和日期* @param 无* @retval 无*/
void RTC_TimeAndDate_Set(void)
{RTC_DateTypeDef RTC_DateStructure;RTC_TimeTypeDef RTC_TimeStructure;// 初始化时间RTC_TimeStructure.TimeFormat = RTC_HOURFORMAT12_AM;RTC_TimeStructure.Hours = 8; RTC_TimeStructure.Minutes = 12; RTC_TimeStructure.Seconds = 26; HAL_RTC_SetTime(&Rtc_Handle,&RTC_TimeStructure, RTC_FORMAT_BIN);// 初始化日期 RTC_DateStructure.WeekDay = RTC_WEEKDAY_TUESDAY; RTC_DateStructure.Date = 23; RTC_DateStructure.Month = RTC_MONTH_APRIL; RTC_DateStructure.Year = 24; HAL_RTC_SetDate(&Rtc_Handle,&RTC_DateStructure, RTC_FORMAT_BIN);}/*** @brief 显示时间和日期* @param 无* @retval 无*/
void RTC_TimeAndDate_Show(void)
{uint8_t Rtctmp=0;RTC_TimeTypeDef RTC_TimeStructure;RTC_DateTypeDef RTC_DateStructure;while(1){// 获取日历HAL_RTC_GetTime(&Rtc_Handle, &RTC_TimeStructure, RTC_FORMAT_BIN);HAL_RTC_GetDate(&Rtc_Handle, &RTC_DateStructure, RTC_FORMAT_BIN);// 每秒打印一次if(Rtctmp != RTC_TimeStructure.Seconds){// 打印日期printf("The Date : Y:20%0.2d - M:%0.2d - D:%0.2d - W:%0.2d\r\n", RTC_DateStructure.Year,RTC_DateStructure.Month, RTC_DateStructure.Date,RTC_DateStructure.WeekDay);// 打印时间printf("The Time : %0.2d:%0.2d:%0.2d \r\n\r\n", RTC_TimeStructure.Hours, RTC_TimeStructure.Minutes, RTC_TimeStructure.Seconds);}Rtctmp = RTC_TimeStructure.Seconds;}
}- 🌿另一个时钟不走时的可能就是,在使用外部低速时钟源作为时钟源时,外部32.756KHz晶振没有起振所致。排查此原因也很简单,将低速时钟源改为内部时钟32KHz进行验证。