MATLAB 控制系统设计与仿真 - 35
MATLAB鲁棒控制器分析
所谓鲁棒性是指控制系统在一定(结构,大小)的参数扰动下,维持某些性能的特征。
根据对性能的不同定义,可分为稳定鲁棒性(Robust stability)和性能鲁棒性(Robust performance)。
以闭环系统的鲁棒性作为目标设计得到的控制器称为鲁棒控制器。
鲁棒控制问题概述
鲁棒控制系统的一般结构如下所示:
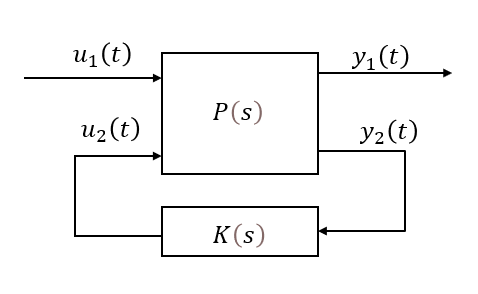
其中P(s)为增广的对象模型,K(s)为控制器模型。从输入信号到输出信号的传递函数可以表示为
.
我们可以用MATLAB鲁棒工具箱中提供的函数augtf/augw来建立增广的双端子系统模型。
增广的双端子状态模型建立举例
MATLAB augtf/augw的调用格式如下:
P=augw(P,W1,W2,W3); % W1为控制器输入信号(误差信号)的加权函数% W2为控制器输出信号的加权函数% W3为输出信号的加权函数%augw要求W1,W2,W3为正则模型
P=augtf(P,W1,W2,W3); % W1为控制器输入信号(误差信号)的加权函数% W2为控制器输出信号的加权函数% W3为输出信号的加权函数
带有加权函数的双端子系统