【电子电力】三相逆变器下垂控制单机并离网,并网预同步
摘要
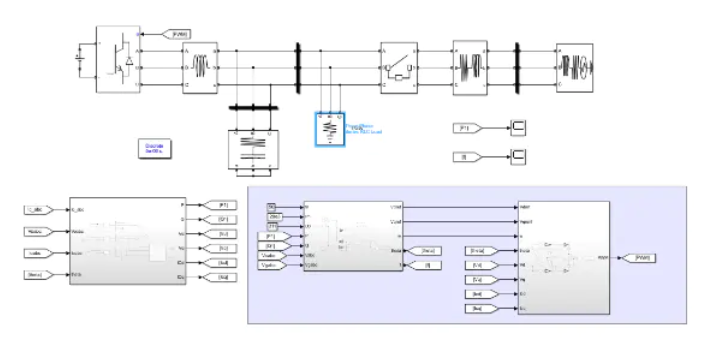
本文研究了三相逆变器的下垂控制策略在单机并网与离网模式下的应用,重点探讨了并网前的预同步过程。通过下垂控制,可以实现逆变器在不同负载条件下的电压和频率调节,并实现无缝切换至并网运行。实验结果表明,所设计的控制策略能够有效实现逆变器在并网与离网模式之间的平滑切换,并在并网过程中通过预同步技术确保电网电压和频率的一致性。
理论
-
下垂控制简介: 下垂控制是一种广泛应用于逆变器控制中的分布式控制策略,用于实现逆变器输出电压和频率的调节。通过调节有功功率和无功功率的下垂系数,逆变器可以根据负载的变化自动调整输出功率,保持系统稳定。下垂控制在离网模式下尤为重要,因为没有外部电网提供频率参考。
-
并网与离网模式切换: 逆变器需要在离网模式下稳定运行,在并网模式下则需与电网同步。并网前的预同步过程确保逆变器输出的电压和频率与电网保持一致,避免并网时出现过大电流冲击。预同步包括检测电网的电压和频率,并通过控制器逐步调整逆变器的输出参数,以实现同步。
-
预同步控制算法: 在并网前,逆变器使用锁相环(PLL)技术检测电网的相位、频率和电压幅值,并通过控制算法调整逆变器的输出。通过逐步减小逆变器与电网之间的相位差和频率差,最终实现顺利并网。
实验结果
-
仿真图1: 显示了三相逆变器在离网模式下通过下垂控制实现稳定输出的仿真结果。逆变器根据不同的负载条件,自动调节输出电压和频率,保持系统稳定运行。
-
仿真图2: 展示了三相逆变器在并网前的预同步过程。通过逐步调整逆变器输出参数,仿真结果表明逆变器的输出电压和频率逐步接近电网,最终实现同步。
-
仿真图3: 并网后的电流与电网保持一致,表明逆变器顺利完成并网。
部分代码
% 下垂控制参数设置
P_ref = 1000; % 有功功率参考值
Q_ref = 500; % 无功功率参考值
Kp = 0.01; % 有功下垂系数
Kq = 0.02; % 无功下垂系数% 逆变器初始电压和频率
V_inv = 230; % 逆变器输出电压
f_inv = 50; % 逆变器输出频率% 预同步过程
V_grid = 230; % 电网电压
f_grid = 50; % 电网频率% 锁相环(PLL)用于检测电网相位、频率
theta_grid = pll(V_grid, f_grid);
theta_inv = pll(V_inv, f_inv);% 并网控制
while abs(theta_grid - theta_inv) > 0.01% 调整逆变器的输出频率和相位f_inv = f_inv + Kp * (P_ref - P_meas);V_inv = V_inv + Kq * (Q_ref - Q_meas);theta_inv = pll(V_inv, f_inv);
end% 实现并网
if abs(theta_grid - theta_inv) < 0.01connect_to_grid();
end% 锁相环(PLL)函数
function theta = pll(V, f)% 计算电压V下的相位角thetatheta = 2 * pi * f * t + atan2(imag(V), real(V));
end
参考文献
❝
Guerrero, J. M., Vasquez, J. C., Matas, J., De Vicuña, L. G., & Castilla, M. (2011). Hierarchical control of droop-controlled AC and DC microgrids—A general approach toward standardization. IEEE Transactions on Industrial Electronics, 58(1), 158-172.
Yazdani, A., & Iravani, R. (2010). Voltage-sourced converters in power systems: modeling, control, and applications. IEEE Press.
Blaabjerg, F., Teodorescu, R., Liserre, M., & Timbus, A. V. (2006). Overview of control and grid synchronization for distributed power generation systems. IEEE Transactions on Industrial Electronics, 53(5), 1398-1409.
(文章内容仅供参考,具体效果以图片为准)