文章目录
- 图像平滑
- 均值滤波
- 高斯滤波
- 中值滤波
- 双边滤波(Bilateral Filtering )
- Python
- C++
图像线性平滑空间滤波(加权均值滤波器,几何均值滤波,谐波均值滤波,逆谐波均值滤波),非线性平滑空间滤波(中值滤波,最大值滤波,最小值滤波)MATLAB自写函数实现
图像平滑
图像平滑,又称图像模糊,是一种简单而常用的图像处理操作,常用于图像去噪。
为了进行平滑操作,我们将对图像使用滤波。最常见的滤波器是线性的,其输出的像素值(即 g ( i , j ) ) g(i,j)) g(i,j))为输入像素值(即 f ( i + k , j + l ) f(i+k,j+l) f(i+k,j+l))的加权和,可以将滤波操作用卷积操作表示:

h ( k , l ) h (k,l) h(k,l)叫做核(kernel)。
下面简单介绍OpenCV中常用的滤波方法,包括均值滤波、高斯滤波中值滤波和双边滤波。
均值滤波
均值滤波的核为:
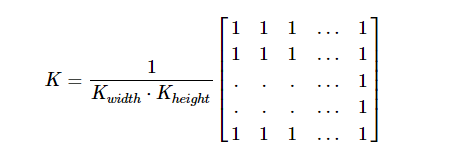
输出的每个像素是它的核覆盖的所有像素的平均值。
OpenCV提供了函数cv.blur()或cv.boxFilter()实现均值滤波。cv.blur()的主要参数有:
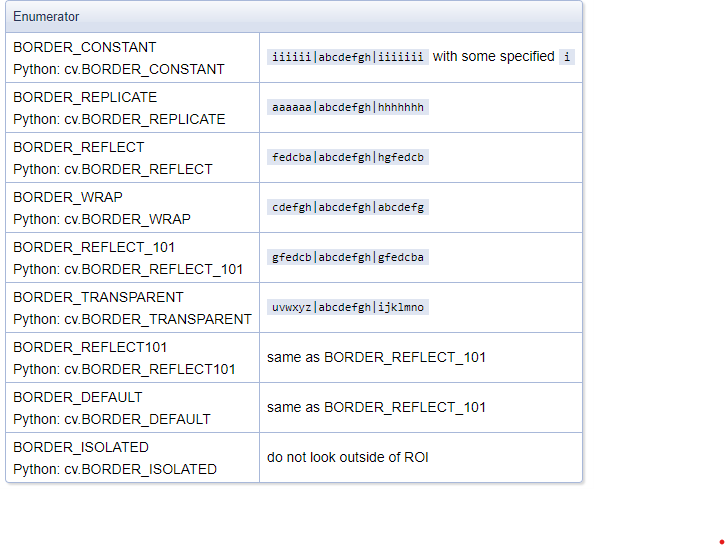
src:输入图像;它可以有任意数量的通道,但类型应该是CV_8U, CV_16U, CV_16S, CV_32F或CV_64F。dst:与src大小和类型相同的输出图像。ksize:核的大小。anchor:表示锚点(计算的像素)相对于整个核邻域的位置。如果为负值,则核的中心被视为锚点。默认值Point(-1,-1)borderType:在图像边界补充像素,防止核的某些元素位于图像之外,有以下补充类型(BORDER_WRAP除外,默认为BORDER_DEFAULT)。
等价于:
boxFilter(src, dst, src.type(), ksize, anchor, true, borderType)
高斯滤波
二维高斯函数可以表示:
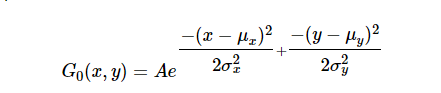
其中 μ μ μ为均值(峰值), σ 2 σ^2 σ2为方差。
根据高斯函数得到的核示例:
| 3x3 | 5x5 |
|---|---|
| 1 16 [ 1 2 1 2 4 2 1 2 1 ] \frac{1}{16}\left[\begin{array}{lll}1 & 2 & 1 \\2 & 4 & 2 \\1 & 2 & 1\end{array}\right] 161 121242121 | 1 159 × [ 2 4 5 4 2 4 9 12 9 4 5 12 15 12 5 4 9 12 9 4 2 4 5 4 2 ] \frac{1}{159} \times\left[\begin{array}{ccccc}2 & 4 & 5 & 4 & 2 \\4 & 9 & 12 & 9 & 4 \\5 & 12 & 15 & 12 & 5 \\4 & 9 & 12 & 9 & 4 \\2 & 4 & 5 & 4 & 2\end{array}\right] 1591× 245424912945121512549129424542 |
高斯滤波是线性的,通过高斯核与输入图像的卷积进行计算,在OpenCV中可以通过函数cv.GaussianBlur()实现。
主要参数有:
src:源图像dst:目标图像ksize:需要两个参数,分别表示高和宽。w和h必须是奇数和正数,否则将使用sigmaX和sigmaY按照OpenCV内置的函数计算。sigmaX:表示 x x x中的标准差,如果值为0,则按照OpenCV内置的函数由核大小计算 σ x σ_x σx。sigmaY:表示 y y y的标准差。写入0表示 σ y σ_y σy由核大小计算。borderType:与均值滤波相同。
中值滤波
中值滤波器遍历图像的每个元素,并将每个像素替换为核区域内所有像素的中值。
中值滤波通过函数cv.medianBlur()完成的。主要参数有:
src:源图像dst:目标图像,必须与src类型相同ksize:核的大小。因为我们使用的是方形窗口,所以只有一个参数。另外,还必须是奇数。
双边滤波(Bilateral Filtering )
高斯滤波它在滤除图像中噪声信号的同时,也会对图像中的边缘信息进行平滑。 双边滤波则可以缓解这个问题。
原理推荐阅读:https://blog.csdn.net/u013921430/article/details/84532068
使用cv.bilateralFilter()实现双边滤波,参数有:
src:源图像dst:目标图像d:每个像素邻域的直径。sigmaColor:颜色空间的标准差。sigmaSpace:坐标空间的标准差。d<=0时,d与sigmaSpace成正比。borderType:与均值滤波相同
Python
import sys
import cv2 as cv
import numpy as np# Global Variables
DELAY_CAPTION = 1500
DELAY_BLUR = 100
MAX_KERNEL_LENGTH = 31
src = None
dst = None
window_name = 'Smoothing Demo'def main(argv):cv.namedWindow(window_name, cv.WINDOW_AUTOSIZE)# Load the source imageimageName = argv[0] if len(argv) > 0 else 'lena.jpg'global srcsrc = cv.imread(cv.samples.findFile(imageName))if src is None:print('Error opening image')print('Usage: smoothing.py [image_name -- default ../data/lena.jpg] \n')return -1if display_caption('Original Image') != 0:return 0global dstdst = np.copy(src)if display_dst(DELAY_CAPTION) != 0:return 0# 均值滤波if display_caption('Homogeneous Blur') != 0:return 0for i in range(1, MAX_KERNEL_LENGTH, 2):dst = cv.blur(src, (i, i))if display_dst(DELAY_BLUR) != 0:return 0# 高斯滤波if display_caption('Gaussian Blur') != 0:return 0for i in range(1, MAX_KERNEL_LENGTH, 2):dst = cv.GaussianBlur(src, (i, i), 0)if display_dst(DELAY_BLUR) != 0:return 0# 中值滤波if display_caption('Median Blur') != 0:return 0for i in range(1, MAX_KERNEL_LENGTH, 2):dst = cv.medianBlur(src, i)if display_dst(DELAY_BLUR) != 0:return 0# 双边滤波if display_caption('Bilateral Blur') != 0:return 0for i in range(1, MAX_KERNEL_LENGTH, 2):dst = cv.bilateralFilter(src, i, i * 2, i / 2)if display_dst(DELAY_BLUR) != 0:return 0# Donedisplay_caption('Done!')return 0def display_caption(caption):global dstdst = np.zeros(src.shape, src.dtype)rows, cols, _ch = src.shapecv.putText(dst, caption,(int(cols / 4), int(rows / 2)),cv.FONT_HERSHEY_COMPLEX, 1, (255, 255, 255))return display_dst(DELAY_CAPTION)def display_dst(delay):cv.imshow(window_name, dst)c = cv.waitKey(delay)if c >= 0: return -1return 0if __name__ == "__main__":main(sys.argv[1:])C++
#include <iostream>
#include "opencv2/imgproc.hpp"
#include "opencv2/imgcodecs.hpp"
#include "opencv2/highgui.hpp"
using namespace std;
using namespace cv;
int DELAY_CAPTION = 1500;
int DELAY_BLUR = 100;
int MAX_KERNEL_LENGTH = 31;
Mat src; Mat dst;
char window_name[] = "Smoothing Demo";
int display_caption( const char* caption );
int display_dst( int delay );
int main( int argc, char ** argv )
{namedWindow( window_name, WINDOW_AUTOSIZE );const char* filename = argc >=2 ? argv[1] : "lena.jpg";src = imread( samples::findFile( filename ), IMREAD_COLOR );if (src.empty()){printf(" Error opening image\n");printf(" Usage:\n %s [image_name-- default lena.jpg] \n", argv[0]);return EXIT_FAILURE;}if( display_caption( "Original Image" ) != 0 ){return 0;}dst = src.clone();if( display_dst( DELAY_CAPTION ) != 0 ){return 0;}if( display_caption( "Homogeneous Blur" ) != 0 ){return 0;}for ( int i = 1; i < MAX_KERNEL_LENGTH; i = i + 2 ){blur( src, dst, Size( i, i ), Point(-1,-1) );if( display_dst( DELAY_BLUR ) != 0 ){return 0;}}if( display_caption( "Gaussian Blur" ) != 0 ){return 0;}for ( int i = 1; i < MAX_KERNEL_LENGTH; i = i + 2 ){GaussianBlur( src, dst, Size( i, i ), 0, 0 );if( display_dst( DELAY_BLUR ) != 0 ){return 0;}}if( display_caption( "Median Blur" ) != 0 ){return 0;}for ( int i = 1; i < MAX_KERNEL_LENGTH; i = i + 2 ){medianBlur ( src, dst, i );if( display_dst( DELAY_BLUR ) != 0 ){return 0;}}if( display_caption( "Bilateral Blur" ) != 0 ){return 0;}for ( int i = 1; i < MAX_KERNEL_LENGTH; i = i + 2 ){bilateralFilter ( src, dst, i, i*2, i/2 );if( display_dst( DELAY_BLUR ) != 0 ){return 0;}}display_caption( "Done!" );return 0;
}
int display_caption( const char* caption )
{dst = Mat::zeros( src.size(), src.type() );putText( dst, caption,Point( src.cols/4, src.rows/2),FONT_HERSHEY_COMPLEX, 1, Scalar(255, 255, 255) );return display_dst(DELAY_CAPTION);
}
int display_dst( int delay )
{imshow( window_name, dst );int c = waitKey ( delay );if( c >= 0 ) { return -1; }return 0;
}
原始图像:

均值滤波(核大小递增:1,3,5,…31):

高斯滤波

中值滤波

双边滤波



![P5470 [NOI2019]序列 题解](https://img2024.cnblogs.com/blog/3387368/202403/3387368-20240327220639720-1293483654.png)