背景:
通常,节点需要响应其自身参数或另一个节点参数的更改。 ParameterEventHandler 类可以轻松侦听参数更改,以便您的代码可以响应它们。本教程将向您展示如何使用 ParameterEventHandler 类的 C++ 版本来监视节点自身参数的更改以及另一个节点参数的更改。
应用场景
- 动态配置:在机器人系统中,经常需要根据不同的环境或任务需求动态调整算法的参数。例如,调整机器人速度、感知算法的灵敏度等。通过监听参数的变化,系统可以即时响应并调整运行参数,而无需重启节点。
- 实时调试和优化:开发者或操作者可以在系统运行时实时修改参数,以测试不同配置的效果,从而找到最优解。这对于算法的调试和优化尤为重要。
- 适应性控制:在变化的环境条件下,如光照、温度或机器人负载变化时,能够自动调整控制策略的参数,使得机器人能更好地适应环境变化。
- 用户交互:在需要用户输入或选择配置的应用中,监听参数变化可以使得系统更加响应用户的操作,提供更加灵活和个性化的服务。
- 条件触发:可以设置参数监听来作为触发某些操作的条件,例如当监测到特定参数达到某个阈值时自动启动或停止某个过程。
- 故障响应:通过实时监控关键参数,系统可以在参数异常时快速做出反应,执行如错误记录、发送警报或启动备用系统等应对措施。
1. 创建包
导航到ros2_study /src并在那里创建一个新包:
ros2 pkg create --build-type ament_cmake --license Apache-2.0 cpp_parameter_event_handler --dependencies rclcpp
cpp_parameter_event_handler您的终端将返回一条消息,验证您的包及其所有必需文件和文件夹的创建。
该--dependencies参数将自动将必要的依赖行添加到package.xml和CMakeLists.txt。
1.1 更新package.xml
由于您--dependencies在包创建期间使用了该选项,因此无需手动将依赖项添加到package.xml或CMakeLists.txt。
- 编写实现代码

在ros2_ws/study/cpp_parameter_event_handler/src目录中,创建一个名为的新文件parameter_event_handler.cpp,并将以下代码粘贴到其中:
#include <memory>#include "rclcpp/rclcpp.hpp"class SampleNodeWithParameters : public rclcpp::Node
{
public:SampleNodeWithParameters(): Node("node_with_parameters"){this->declare_parameter("an_int_param", 0);// Create a parameter subscriber that can be used to monitor parameter changes// (for this node's parameters as well as other nodes' parameters)param_subscriber_ = std::make_shared<rclcpp::ParameterEventHandler>(this);// Set a callback for this node's integer parameter, "age"auto cb = [this](const rclcpp::Parameter & p) {RCLCPP_INFO(this->get_logger(), "cb: Received an update to parameter \"%s\" of type %s: \"%ld\"",p.get_name().c_str(),p.get_type_name().c_str(),p.as_int());};cb_handle_ = param_subscriber_->add_parameter_callback("age", cb);}private:std::shared_ptr<rclcpp::ParameterEventHandler> param_subscriber_;std::shared_ptr<rclcpp::ParameterCallbackHandle> cb_handle_;
};int main(int argc, char ** argv)
{rclcpp::init(argc, argv);rclcpp::spin(std::make_shared<SampleNodeWithParameters>());rclcpp::shutdown();return 0;
}
2.1 上面关键代码说明
包引用:
代码引用 rclcpp 接口提供的各种功能,包括 ParameterEventHandler 类。#include <memory>#include "rclcpp/rclcpp.hpp"
在类声明之后,代码定义了一个类,SampleNodeWithParameters.该类的构造函数声明一个整数参数 age ,默认值为 0。接下来,代码创建一个ParameterEventHandler将用于监视参数更改的 。最后,代码创建一个 lambda 函数并将其设置为每当 age 更新时调用的回调。
注意数据类型定义 :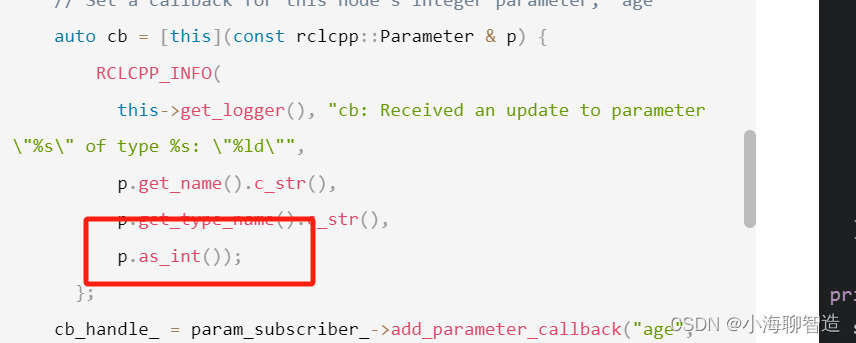
保存返回的句柄非常重要add_parameter_callback;否则,回调将无法正确注册。
接下来SampleNodeWithParameters是一个典型的main函数,它初始化 ROS,示例节点以便它可以发送和接收消息,然后在用户在控制台输入 Ctrl +C 后关闭。
int main(int argc, char ** argv)
{rclcpp::init(argc, argv);rclcpp::spin(std::make_shared<SampleNodeWithParameters>());rclcpp::shutdown();return 0;
}
在调用rclcpp::spin时,实际上就调用了单线程节点执行器
2.2 添加可执行文件
要构建此代码,首先打开文件CMakeLists.txt并在依赖项下方添加以下代码行find_package(rclcpp REQUIRED)
add_executable(parameter_event_handler src/parameter_event_handler.cpp)
ament_target_dependencies(parameter_event_handler rclcpp)install(TARGETSparameter_event_handlerDESTINATION lib/${PROJECT_NAME}
)

3. 构建并运行
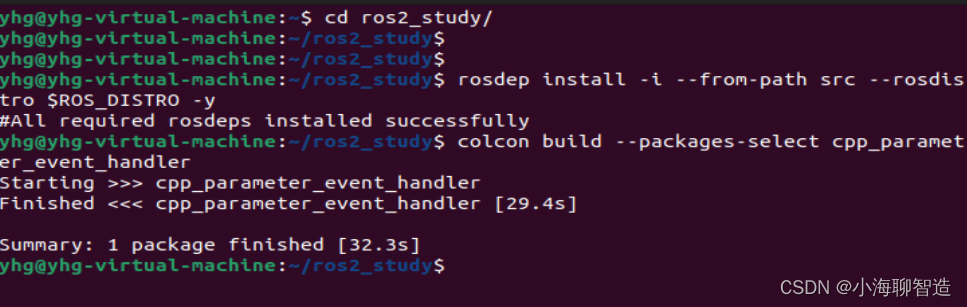
在构建之前,最好rosdep在工作区的根目录 ( ros2_study) 中运行以检查是否缺少依赖项:
rosdep install -i --from-path src --rosdistro $ROS_DISTRO -y
构建新包
colcon build --packages-select cpp_parameter_event_handler
回顾--packages-select 指定这个包构建
构建成功如下图
运行:
打开一个新终端,导航到ros2_study并获取安装文件:
. install/setup.bash
运行节点:
ros2 run cpp_parameter_event_handler parameter_event_handler
该节点现在处于活动状态并且具有单个参数,并且每当该参数更新时都会打印一条消息。要测试这一点,请打开另一个终端并像以前一样获取 ROS 安装文件 (.install/setup.bash),然后执行以下命令:
ros2 param set node_with_parameters age 18
运行该节点的终端将显示类似以下内容的消息:

我们之前在节点中设置的回调已被调用并显示了新的更新值。您现在可以在终端中使用 Ctrl+ C 终止正在运行的parameter_event_handler 示例。
3.1 从另外一个节点监听
您还可以使用 ParameterEventHandler 来监视另一个节点参数的参数更改。让我们更新 SampleNodeWithParameters 类,以监视另一个节点中参数的更改。我们将使用parameter_blackboard演示应用程序来托管我们将监视其更新的双参数。
首先更新构造函数,在现有代码后面添加以下代码:
auto cb2 = [this](const rclcpp::Parameter & p) {RCLCPP_INFO(this->get_logger(), "cb2: Received an update to parameter \"%s\" of type: %s: \"%.02lf\"",p.get_name().c_str(),p.get_type_name().c_str(),p.as_double());};auto remote_node_name = std::string("parameter_blackboard");auto remote_param_name = std::string("price");cb_handle2_ = param_subscriber_->add_parameter_callback(remote_param_name, cb2, remote_node_name);重新编译:
colcon build --packages-select cpp_parameter_event_handler

然后获取安装文件:
. install/setup.bash
现在,要测试远程参数的监控,首先运行新建的parameter_event_handler代码:
ros2 run cpp_parameter_event_handler parameter_event_handler
接下来,从另一个终端(已初始化 ROS)运行parameter_blackboard 演示应用程序,如下所示:
ros2 run demo_nodes_cpp parameter_blackboard
执行此命令后,您应该在parameter_event_handler窗口中看到输出,表明在参数更新时调用了回调函数
最后,从第三个终端(已初始化 ROS),让我们在parameter_blackboard 节点上设置一个参数:
ros2 param set parameter_blackboard price 3.45