目录
准备
- 扫雷软件
实现思路
- 01 窗体截取
- 02 雷块分割
- 03 雷块识别
- 04 扫雷算法实现
福利:文末有Python全套资料哦
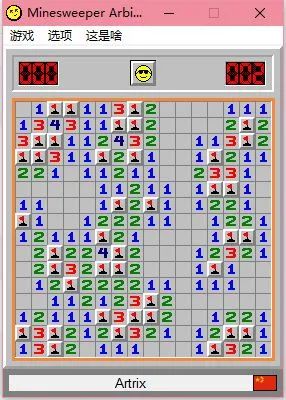
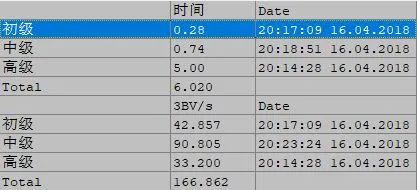
我们一起来玩扫雷吧。用Python+OpenCV实现了自动扫雷,突破世界记录,我们先来看一下效果吧。
中级 - 0.74秒 3BV/S=60.81
相信许多人很早就知道有扫雷这么一款经典的游(显卡测试)戏(软件),更是有不少人曾听说过中国雷圣,也是中国扫雷第一、世界综合排名第二的郭蔚嘉的顶顶大名。扫雷作为一款在Windows9x时代就已经诞生的经典游戏,从过去到现在依然都有着它独特的魅力:快节奏高精准的鼠标操作要求、快速的反应能力、刷新纪录的快感,这些都是扫雷给雷友们带来的、只属于扫雷的独一无二的兴奋点。
准备
准备动手制作一套扫雷自动化软件之前,你需要准备如下一些工具/软件/环境
- 开发环境
-
Python3 环境 - 推荐3.6或者以上 [更加推荐Anaconda3,以下很多依赖库无需安装]
-
numpy依赖库 [如有Anaconda则无需安装]
-
PIL依赖库 [如有Anaconda则无需安装]
-
opencv-python
-
win32gui、win32api依赖库
-
支持Python的IDE [可选,如果你能忍受用文本编辑器写程序也可以]
- 扫雷软件
· Minesweeper Arbiter 下载地址(必须使用MS-Arbiter来进行扫雷!)
好啦,那么我们的准备工作已经全部完成了!让我们开始吧~
实现思路
在去做一件事情之前最重要的是什么?是将要做的这件事情在心中搭建一个步骤框架。只有这样,才能保证在去做这件事的过程中,尽可能的做到深思熟虑,使得最终有个好的结果。我们写程序也要尽可能做到在正式开始开发之前,在心中有个大致的思路。
对于本项目而言,大致的开发过程是这样的:
-
完成窗体内容截取部分
-
完成雷块分割部分
-
完成雷块类型识别部分
-
完成扫雷算法
好啦,既然我们有了个思路,那就撸起袖子大力干!
- 01 窗体截取
其实对于本项目而言,窗体截取是一个逻辑上简单,实现起来却相当麻烦的部分,而且还是必不可少的部分。我们通过Spy++得到了以下两点信息:
class_name = "TMain"
title_name = "Minesweeper Arbiter "
ms_arbiter.exe的主窗体类别为"TMain"ms_arbiter.exe的主窗体名称为"Minesweeper Arbiter "注意到了么?主窗体的名称后面有个空格。正是这个空格让笔者困扰了一会儿,只有加上这个空格,win32gui才能够正常的获取到窗体的句柄。
本项目采用了win32gui来获取窗体的位置信息,具体代码如下:
hwnd = win32gui.FindWindow(class_name, title_name)
if hwnd:
left, top, right, bottom = win32gui.GetWindowRect(hwnd)通过以上代码,我们得到了窗体相对于整块屏幕的位置。之后我们需要通过PIL来进行扫雷界面的棋盘截取。
我们需要先导入PIL库
from PIL import ImageGrab然后进行具体的操作。
left += 15
top += 101
right -= 15
bottom -= 43rect = (left, top, right, bottom)
img = ImageGrab.grab().crop(rect)聪明的你肯定一眼就发现了那些奇奇怪怪的Magic Numbers,没错,这的确是Magic Numbers,是我们通过一点点细微调节得到的整个棋盘相对于窗体的位置。
注意:这些数据仅在Windows10下测试通过,如果在别的Windows系统下,不保证相对位置的正确性,因为老版本的系统可能有不同宽度的窗体边框。
橙色的区域是我们所需要的
好啦,棋盘的图像我们有了,下一步就是对各个雷块进行图像分割了~
- 02 雷块分割
![]()
在进行雷块分割之前,我们事先需要了解雷块的尺寸以及它的边框大小。经过笔者的测量,在ms_arbiter下,每一个雷块的尺寸为16px*16px。
知道了雷块的尺寸,我们就可以进行每一个雷块的裁剪了。首先我们需要知道在横和竖两个方向上雷块的数量。
block_width, block_height = 16, 16blocks_x = int((right - left) / block_width)blocks_y = int((bottom - top) / block_height)之后,我们建立一个二维数组用于存储每一个雷块的图像,并且进行图像分割,保存在之前建立的数组中。
def crop_block(hole_img, x, y):x1, y1 = x * block_width, y * block_heightx2, y2 = x1 + block_width, y1 + block_height
return hole_img.crop((x1, y1, x2, y2))blocks_img = [[0 for i in range(blocks_y)] for i in range(blocks_x)]for y in range(blocks_y):
for x in range(blocks_x):blocks_img[x][y] = crop_block(img, x, y)将整个图像获取、分割的部分封装成一个库,随时调用就OK啦~在笔者的实现中,我们将这一部分封装成了imageProcess.py,其中函数get_frame()用于完成上述的图像获取、分割过程。
- 03 雷块识别
这一部分可能是整个项目里除了扫雷算法本身之外最重要的部分了。笔者在进行雷块检测的时候采用了比较简单的特征,高效并且可以满足要求。
def analyze_block(self, block, location):block = imageProcess.pil_to_cv(block)block_color = block[8, 8]x, y = location[0], location[1]# -1:Not opened# -2:Opened but blank# -3:Un initialized# Opened
if self.equal(block_color, self.rgb_to_bgr((192, 192, 192))):
if not self.equal(block[8, 1], self.rgb_to_bgr((255, 255, 255))):
self.blocks_num[x][y] = -2
self.is_started = True
else:
self.blocks_num[x][y] = -1elif self.equal(block_color, self.rgb_to_bgr((0, 0, 255))):
self.blocks_num[x][y] = 1elif self.equal(block_color, self.rgb_to_bgr((0, 128, 0))):
self.blocks_num[x][y] = 2elif self.equal(block_color, self.rgb_to_bgr((255, 0, 0))):
self.blocks_num[x][y] = 3elif self.equal(block_color, self.rgb_to_bgr((0, 0, 128))):
self.blocks_num[x][y] = 4elif self.equal(block_color, self.rgb_to_bgr((128, 0, 0))):
self.blocks_num[x][y] = 5elif self.equal(block_color, self.rgb_to_bgr((0, 128, 128))):
self.blocks_num[x][y] = 6elif self.equal(block_color, self.rgb_to_bgr((0, 0, 0))):
if self.equal(block[6, 6], self.rgb_to_bgr((255, 255, 255))):# Is mine
self.blocks_num[x][y] = 9elif self.equal(block[5, 8], self.rgb_to_bgr((255, 0, 0))):# Is flag
self.blocks_num[x][y] = 0
else:
self.blocks_num[x][y] = 7elif self.equal(block_color, self.rgb_to_bgr((128, 128, 128))):
self.blocks_num[x][y] = 8
else:
self.blocks_num[x][y] = -3
self.is_mine_form = Falseif self.blocks_num[x][y] == -3 or not self.blocks_num[x][y] == -1:
self.is_new_start = False可以看到,我们采用了读取每个雷块的中心点像素的方式来判断雷块的类别,并且针对插旗、未点开、已点开但是空白等情况进行了进一步判断。具体色值是笔者直接取色得到的,并且屏幕截图的色彩也没有经过压缩,所以通过中心像素结合其他特征点来判断类别已经足够了,并且做到了高效率。
在本项目中,我们实现的时候采用了如下标注方式:
-
1-8:表示数字1到8
-
9:表示是地雷
-
0:表示插旗
-
-1:表示未打开
-
-2:表示打开但是空白
-
-3:表示不是扫雷游戏中的任何方块类型
通过这种简单快速又有效的方式,我们成功实现了高效率的图像识别。
- 04 扫雷算法实现
这可能是本篇文章最激动人心的部分了。在这里我们需要先说明一下具体的扫雷算法思路:
-
遍历每一个已经有数字的雷块,判断在它周围的九宫格内未被打开的雷块数量是否和本身数字相同,如果相同则表明周围九宫格内全部都是地雷,进行标记。
-
再次遍历每一个有数字的雷块,取九宫格范围内所有未被打开的雷块,去除已经被上一次遍历标记为地雷的雷块,记录并且点开。
-
如果以上方式无法继续进行,那么说明遇到了死局,选择在当前所有未打开的雷块中随机点击。(当然这个方法不是最优的,有更加优秀的解决方案,但是实现相对麻烦)
基本的扫雷流程就是这样,那么让我们来亲手实现它吧~
首先我们需要一个能够找出一个雷块的九宫格范围的所有方块位置的方法。因为扫雷游戏的特殊性,在棋盘的四边是没有九宫格的边缘部分的,所以我们需要筛选来排除掉可能超过边界的访问。
def analyze_block(self, block, location):block = imageProcess.pil_to_cv(block)block_color = block[8, 8]x, y = location[0], location[1]# -1:Not opened# -2:Opened but blank# -3:Un initialized# Opened
if self.equal(block_color, self.rgb_to_bgr((192, 192, 192))):
if not self.equal(block[8, 1], self.rgb_to_bgr((255, 255, 255))):
self.blocks_num[x][y] = -2
self.is_started = True
else:
self.blocks_num[x][y] = -1elif self.equal(block_color, self.rgb_to_bgr((0, 0, 255))):
self.blocks_num[x][y] = 1elif self.equal(block_color, self.rgb_to_bgr((0, 128, 0))):
self.blocks_num[x][y] = 2elif self.equal(block_color, self.rgb_to_bgr((255, 0, 0))):
self.blocks_num[x][y] = 3elif self.equal(block_color, self.rgb_to_bgr((0, 0, 128))):
self.blocks_num[x][y] = 4elif self.equal(block_color, self.rgb_to_bgr((128, 0, 0))):
self.blocks_num[x][y] = 5elif self.equal(block_color, self.rgb_to_bgr((0, 128, 128))):
self.blocks_num[x][y] = 6elif self.equal(block_color, self.rgb_to_bgr((0, 0, 0))):
if self.equal(block[6, 6], self.rgb_to_bgr((255, 255, 255))):# Is mine
self.blocks_num[x][y] = 9elif self.equal(block[5, 8], self.rgb_to_bgr((255, 0, 0))):# Is flag
self.blocks_num[x][y] = 0
else:
self.blocks_num[x][y] = 7elif self.equal(block_color, self.rgb_to_bgr((128, 128, 128))):
self.blocks_num[x][y] = 8
else:
self.blocks_num[x][y] = -3
self.is_mine_form = Falseif self.blocks_num[x][y] == -3 or not self.blocks_num[x][y] == -1:
self.is_new_start = False我们在这一部分通过检测当前雷块是否在棋盘的各个边缘来进行核的删除(在核中,1为保留,0为舍弃),之后通过generate_kernel函数来进行最终坐标的生成。
def count_unopen_blocks(blocks):count = 0
for single_block in blocks:
if self.blocks_num[single_block[1]][single_block[0]] == -1:count += 1
return countdef mark_as_mine(blocks):
for single_block in blocks:
if self.blocks_num[single_block[1]][single_block[0]] == -1:
self.blocks_is_mine[single_block[1]][single_block[0]] = 1unopen_blocks = count_unopen_blocks(to_visit)
if unopen_blocks == self.blocks_num[x][y]:mark_as_mine(to_visit)在完成核的生成之后,我们有了一个需要去检测的雷块“地址簿”:to_visit。之后,我们通过count_unopen_blocks函数来统计周围九宫格范围的未打开数量,并且和当前雷块的数字进行比对,如果相等则将所有九宫格内雷块通过mark_as_mine函数来标注为地雷。
def mark_to_click_block(blocks):
for single_block in blocks:# Not Mine
if not self.blocks_is_mine[single_block[1]][single_block[0]] == 1:
# Click-able
if self.blocks_num[single_block[1]][single_block[0]] == -1:# Source Syntax: [y][x] - Converted
if not (single_block[1], single_block[0]) in self.next_steps:
self.next_steps.append((single_block[1], single_block[0]))def count_mines(blocks):count = 0
for single_block in blocks:
if self.blocks_is_mine[single_block[1]][single_block[0]] == 1:count += 1
return countmines_count = count_mines(to_visit)if mines_count == block:mark_to_click_block(to_visit)扫雷流程中的第二步我们也采用了和第一步相近的方法来实现。先用和第一步完全一样的方法来生成需要访问的雷块的核,之后生成具体的雷块位置,通过count_mines函数来获取九宫格范围内所有雷块的数量,并且判断当前九宫格内所有雷块是否已经被检测出来。
如果是,则通过mark_to_click_block函数来排除九宫格内已经被标记为地雷的雷块,并且将剩余的安全雷块加入next_steps数组内。
# Analyze the number of blocks
self.iterate_blocks_image(BoomMine.analyze_block)# Mark all mines
self.iterate_blocks_number(BoomMine.detect_mine)# Calculate where to click
self.iterate_blocks_number(BoomMine.detect_to_click_block)if self.is_in_form(mouseOperation.get_mouse_point()):
for to_click in self.next_steps:on_screen_location = self.rel_loc_to_real(to_click)mouseOperation.mouse_move(on_screen_location[0], on_screen_location[1])mouseOperation.mouse_click()在最终的实现内,笔者将几个过程都封装成为了函数,并且可以通过iterate_blocks_number方法来对所有雷块都使用传入的函数来进行处理,这有点类似Python中Filter的作用。
之后笔者做的工作就是判断当前鼠标位置是否在棋盘之内,如果是,就会自动开始识别并且点击。具体的点击部分,笔者采用了作者为"wp"的一份代码(从互联网搜集而得),里面实现了基于win32api的窗体消息发送工作,进而完成了鼠标移动和点击的操作。具体实现封装在mouseOperation.py中,有兴趣可以在文末的Github Repo中查看。
-
项目完整代码/GitHub地址 | https://github.com/ArtrixTech/BoomMine
-
充电君会在第一时间给你带来最新、最全面的解读,别忘了三联一波哦。
关注公众号:资源充电吧
回复:Chat GPT
充电君发你:免费畅享使用中文版哦
点击小卡片关注下,回复:IT想要的资料全都有