- Camera
FOV: Filed of view
DOV: deep of view 景深 被F = f/D 衡量,f 是焦距,D 是光圈大小。
当确定好了景深后,如何光线较暗,则需要补光,或者适当延长曝光时间(快门)
分辨率、像素尺寸,帧率,像素深度,接口
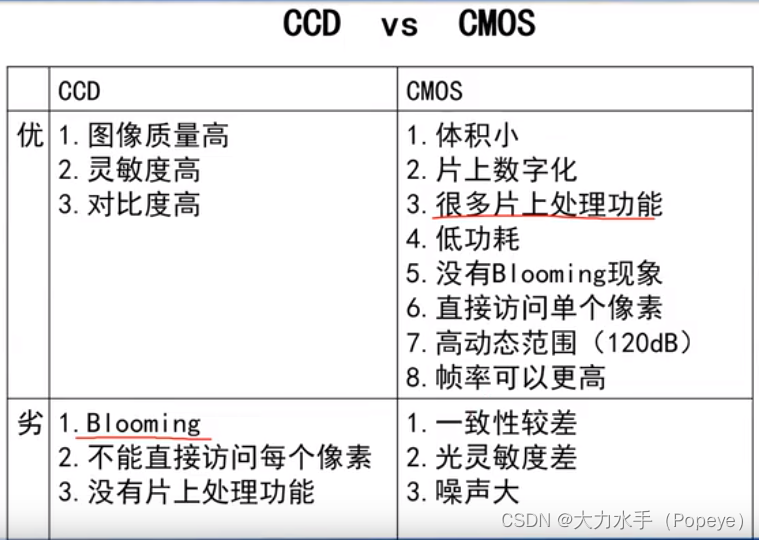
分类: CCD CMOS / 线阵相机和面阵相机
Shutter
黑白相机和彩色相机:
如果任务和颜色无关,则黑白相机的精度较高
如何实现grb相机、bayer pattern.
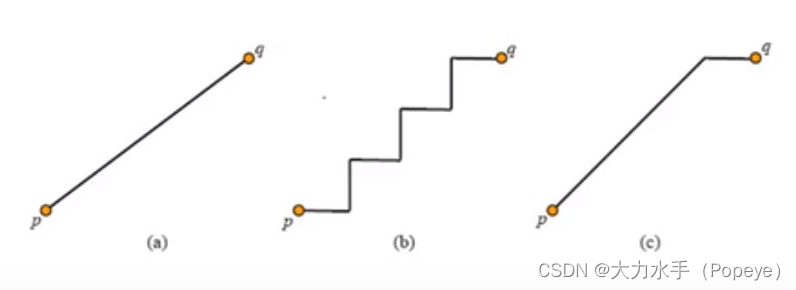
图像数字化过程
sampling (Sampling ·interval) -> quantization(量化精度) -> encoding -> transportation ->
DIP:
corrosion (腐蚀)、 领域 / 邻接 (m邻接) / ()
distance : eluer distance /
灰度直方图: Grayscale histogram
Geometry Transformation:
- translation
- rotation
- scale
- affine transformation
- projective transformation()
Homography matrix
gradient
频率滤波器
basic knowledge:
- 图像灰度均匀的区域对用 低频部分。
- 图像中的噪声, 边缘, 细节对应高频部分。
过程: 快速傅里叶》低筒和高通滤波》反傅里叶变换
频谱图中:




![[HTML、CSS]细节与使用经验](https://img-blog.csdnimg.cn/direct/58058f0d23f34b9e887bca8fdbdd3f7b.gif)

![[转帖]Nginx+Keepalived实现简单的服务高可用](https://upload-images.jianshu.io/upload_images/1648617-ab5b0c3920538283.png)