多目标粒子群优化(Multi-Objective Particle Swarm Optimization, MOPSO)算法是一种基于种群的优化算法,它结合了粒子群优化(Particle Swarm Optimization, PSO)和多目标优化的思想。多目标粒子群(MOPSO)算法是由CarlosA. Coello Coello等在2004年提出来的。
以下是对多目标粒子群算法流程的另一种表达方式:
(1) 粒子速度更新机制
粒子速度的更新是基于三个关键组成部分:
- 惯性部分:它保持了粒子先前的运动方向和速度,有助于粒子保持其运动惯性。
- 个体认知部分:反映了粒子向其个体历史最佳位置的趋近,体现了粒子的自我学习和调整能力。
- 社会认知部分:体现了粒子向整个群体中的最佳位置(全局最优)的趋近,反映了粒子间的社会学习和协作。
(2) 粒子位置更新
粒子根据更新后的速度调整其位置,这个过程是粒子在搜索空间中进行探索和寻找更优解的关键步骤。
(3) 个体历史最优位置pbest的选择
对于每个粒子,算法会比较其当前目标函数值和个体历史最优位置的目标函数值。如果两者互不支配,即没有一个在所有目标上都优于另一个,则随机选择一个作为新的历史最优。若存在支配关系,则选择支配的解作为新的历史最优。
(4) 全局最优位置gbest的选择
在多目标优化中,全局最优不是单一的解,而是一组非支配解。MOPSO算法根据非支配解集中的拥挤程度来选择一个全局领导者。选择过程倾向于那些位于较不拥挤区域的粒子,以增加对未知区域的探索。选择概率与粒子的拥挤程度成反比,即粒子所处位置越拥挤,被选择的概率越低。
(5) 非支配解集的更新
在每次迭代后,非支配解集都会进行更新,以确保它包含当前种群中的最佳非支配解。更新过程包括三个步骤:
- 初步筛选:首先,根据支配关系去除劣解,只保留非被支配的解,并将它们加入到非支配解集中。
- 内部筛选:在非支配解集内部再次根据支配关系进行筛选,进一步去除可能的劣解,并确定每个粒子在网格中的位置。
- 数量控制:如果非支配解集的数量超过了设定的阈值,算法会根据自适应网格方法进行筛选,以减少非支配解的数量,直到满足数量限制。随后,重新进行网格划分以适应新的非支配解集。
总体流程图如下:

完整代码见: https://download.csdn.net/download/corn1949/89218695
MATLAB主程序部分代码如下:
%% 多目标粒子群算法% 清除所有变量,关闭所有图形窗口,关闭所有警告信息
clc; close all; clear all; warning off;% 设置随机数生成器的种子,以确保结果的可重复性
rand('seed', 100);
randn('seed', 100);% 设置数值显示格式为长精度科学计数法
format long g;% 定义变量的下界和上界
lb = -4 * ones(1, 5);
ub = 4 * ones(1, 5);% 定义速度的下界和上界
vlb = (ub - lb) * -0.05;
vub = (ub - lb) * 0.05;% 获取变量的维度
dimension = length(lb);% 定义问题的目标数(这里设置为2,表示有两个优化目标)
N = 2;%% 多目标粒子群算法参数设置% 种群大小
popsize = 50;% 帕累托集的大小
nRep = 20;% 最大迭代次数
maxgen = 100;% 定义算法中的一些参数
phi1 = 2.05;
phi2 = 2.05;
phi = phi1 + phi2;
chi = 2 / (phi - 2 + sqrt(phi^2 - 4 * phi));
w = chi; % 惯性权重
wdamp = 1; % 惯性权重阻尼比
c1 = chi * phi1; % 个体学习系数
c2 = chi * phi2; % 全局学习系数
alpha = 0.1; % 网格膨胀参数
nGrid = 10; % 每一维的网格数
beta = 4; % 选择压力参数
gamma = 2; % 帕累托集选择被删除的压力参数%% 初始化粒子群% 生成初始粒子和速度
[psomat, vmat] = genchrom(popsize, dimension, lb, ub, vlb, vub);
particle = CreateEmptyParticle(popsize);% 初始化每个粒子的速度、位置、成本和最佳位置
for i = 1:popsizeparticle(i).Velocity = vmat(i, :);particle(i).Position = psomat(i, :);particle(i).Cost = myfun(particle(i).Position);particle(i).Best.Position = particle(i).Position;particle(i).Best.Cost = particle(i).Cost;
end% 确定粒子间的支配关系
particle = DetermineDomination(particle);% 获取非支配粒子
rep = GetNonDominatedParticles(particle);
rep_costs = GetCosts(rep);% 创建超立方体网格
G = CreateHypercubes(rep_costs, nGrid, alpha);% 为每个非支配粒子分配网格索引
for i = 1:numel(rep)[rep(i).GridIndex rep(i).GridSubIndex] = GetGridIndex(rep(i), G);
end% 初始化记录每代最佳和平均成本的矩阵
trace_best_mat = zeros(maxgen, N);
trace_mean_mat = zeros(maxgen, N);%% MOPSO主循环wait_hand = waitbar(0, 'running...', 'tag', 'TMWWaitbar');
for gen = 1:maxgenfor i = 1:popsize% 选择领导者粒子rep_h = SelectLeader(rep, beta);% 更新粒子的速度V = particle(i).Velocity;V = w * V + c1 * rand * (particle(i).Best.Position - particle(i).Position) + c2 * rand * (rep_h.Position - particle(i).Position);V = limitspeed(V, vlb, vub, dimension);particle(i).Velocity = V;% 更新粒子位置p = particle(i).Position;p = p + V;p = limitposition(p, lb, ub, dimension);particle(i).Position = p;particle(i).Cost = myfun(particle(i).Position);% 更新粒子的最佳位置if Dominates(particle(i), particle(i).Best)particle(i).Best.Position = particle(i).Position;particle(i).Best.Cost = particle(i).Cost;elseif ~Dominates(particle(i).Best, particle(i)) && rand < 0.5particle(i).Best.Position = particle(i).Position;particle(i).Best.Cost = particle(i).Cost;endend% 确定粒子间的支配关系,并获取非支配粒子particle = DetermineDomination(particle);nd_particle = GetNonDominatedParticles(particle);rep = [rep; nd_particle];rep = DetermineDomination(rep);rep = GetNonDominatedParticles(rep);% 为每个非支配粒子分配网格索引for i = 1:numel(rep)[rep(i).GridIndex rep(i).GridSubIndex] = GetGridIndex(rep(i), G);end% 如果非支配解的数量超过了设定的帕累托集大小,则进行删除操作if numel(rep) > nRepEXTRA = numel(rep) - nRep;rep = DeleteFromRep(rep, EXTRA, gamma);rep_costs = GetCosts(rep);G = CreateHypercubes(rep_costs, nGrid, alpha);end% 更新惯性权重w = w * wdamp;% 记录每代的最佳和平均成本costs20gen=GetCosts(particle);% trace_best_mat(gen,:)=min(costs20gen');if gen==1trace_best_mat(gen,:)=min(costs20gen');elsevminmat=min(costs20gen');vminmat2=trace_best_mat(gen-1,:);trace_best_mat(gen,:)=trace_best_mat(gen-1,:);mat301=vminmat-vminmat2;h301= mat301<0;trace_best_mat(gen,h301)=vminmat(h301);endtrace_mean_mat(gen,:)=mean(costs20gen');waitbar(gen/maxgen,wait_hand);
end
delete(wait_hand);
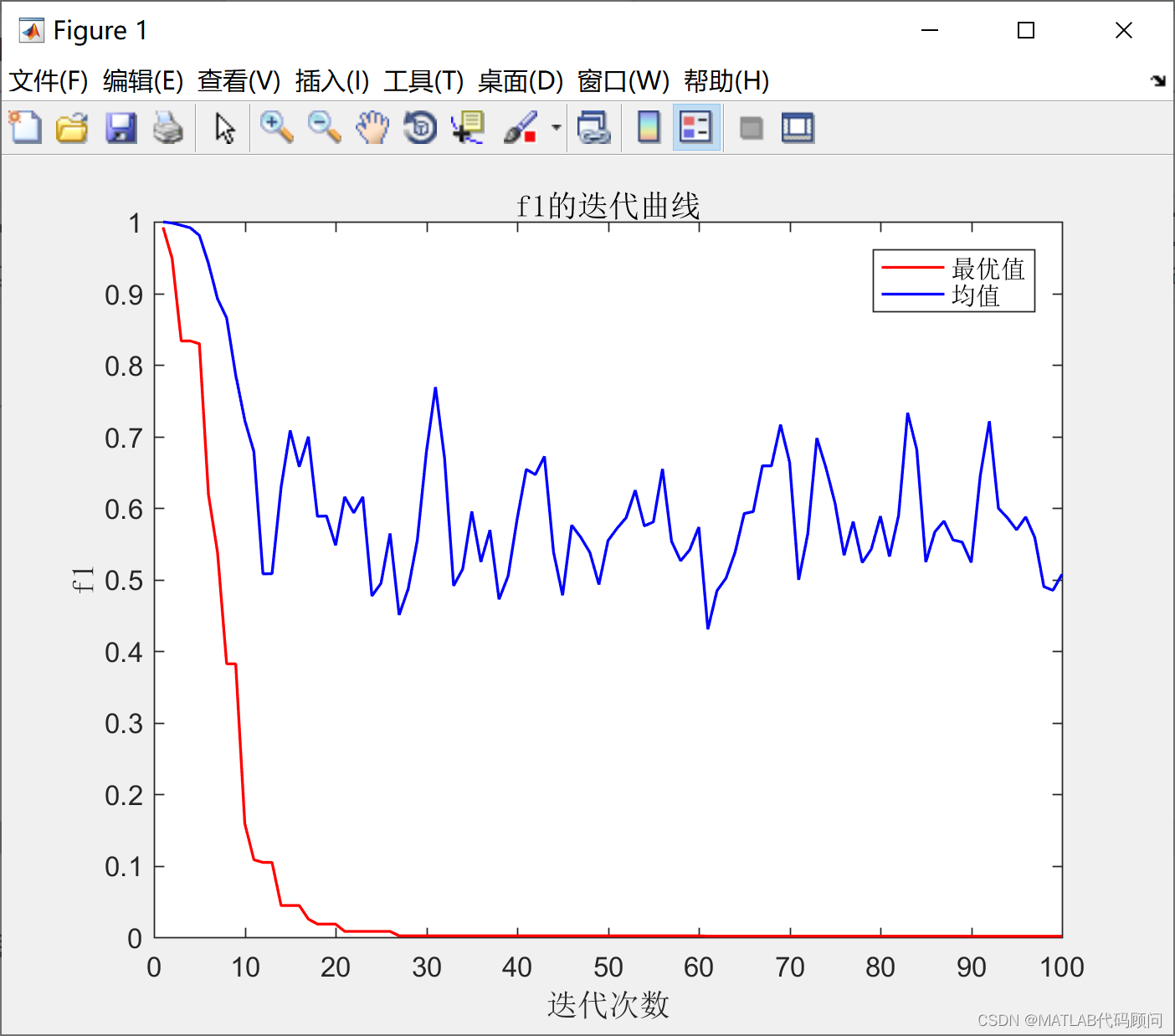
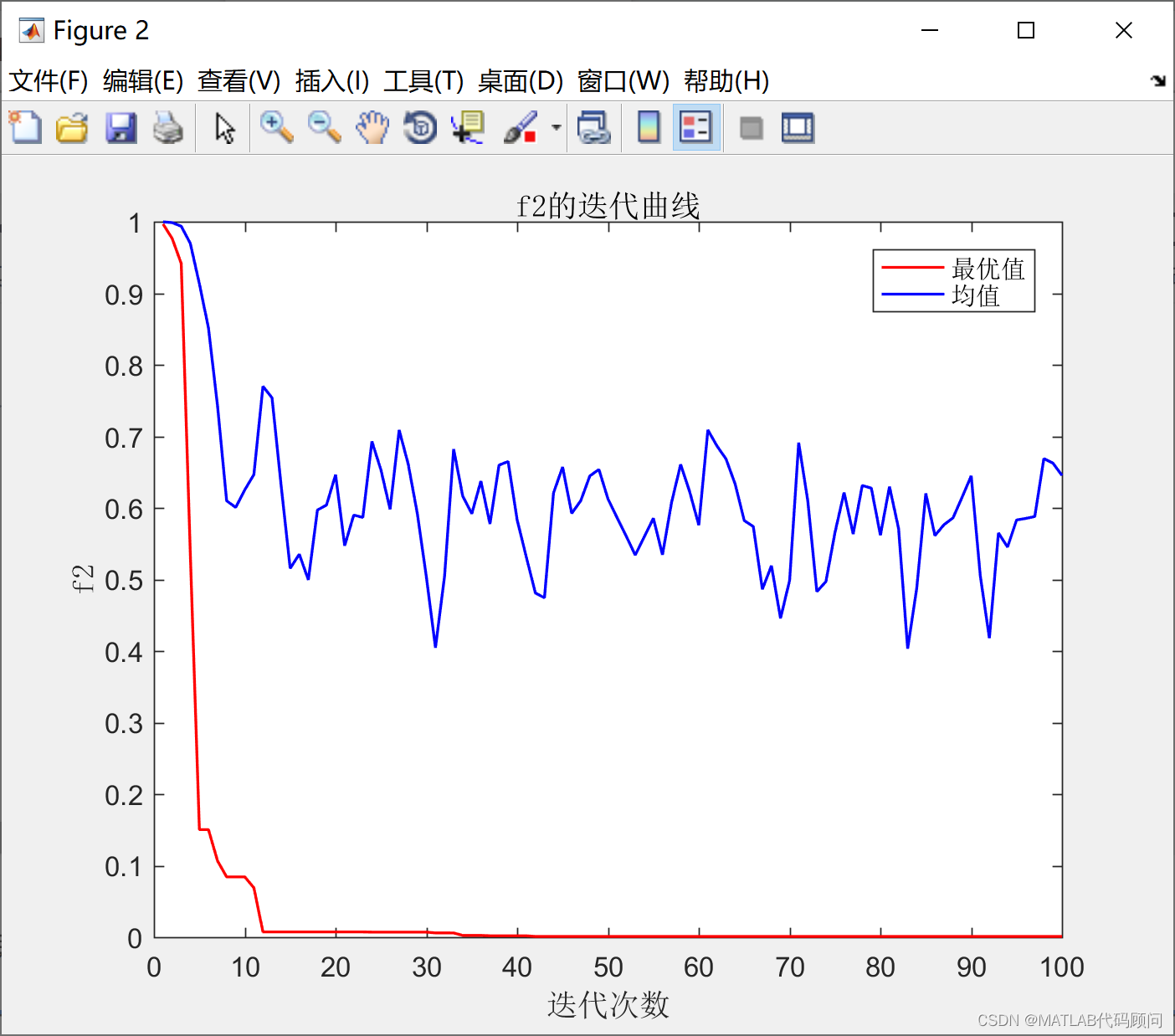
%% 输出结果costs=GetCosts(particle);
rep_costs=GetCosts(rep);程序结果如下:
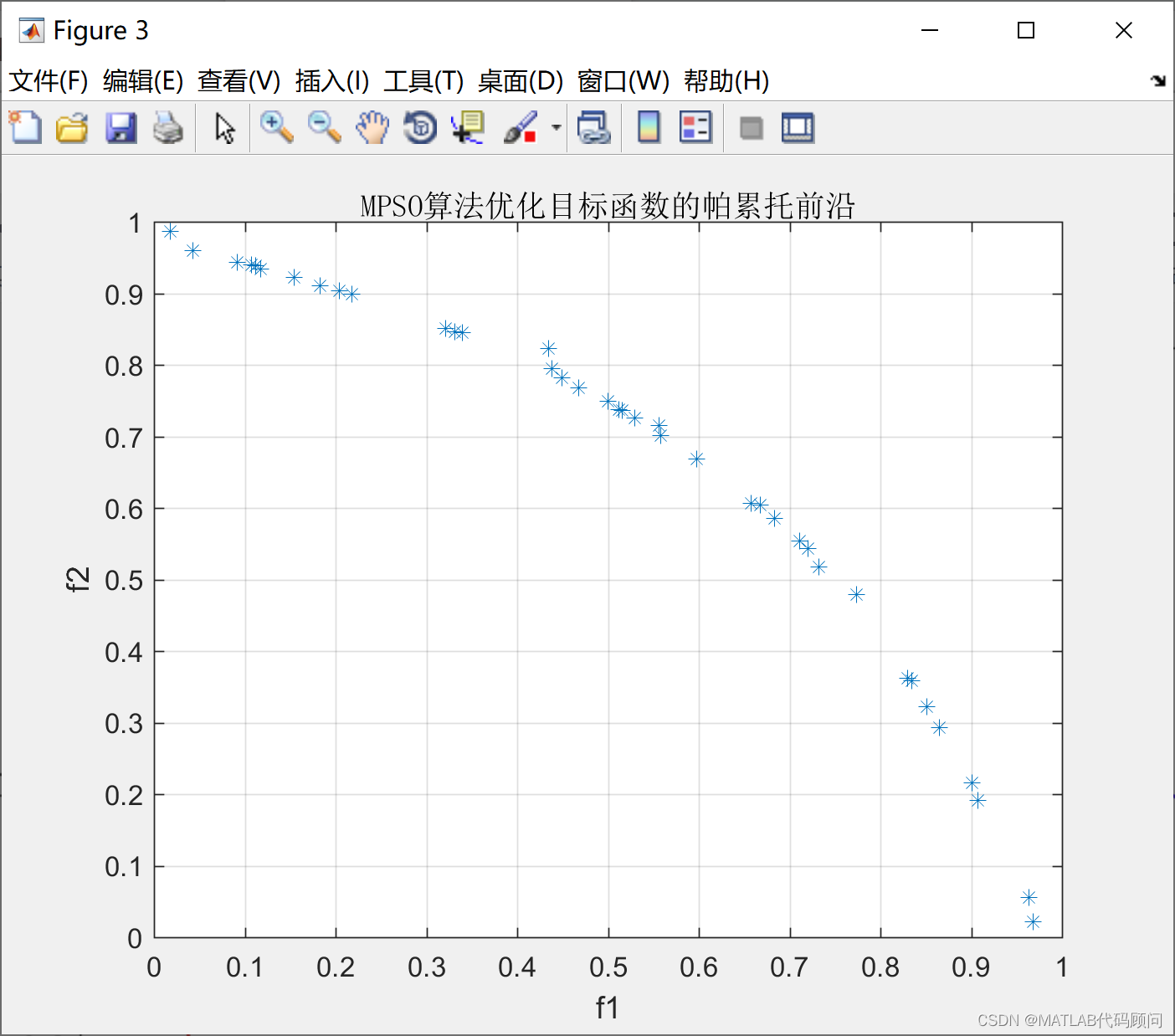
非支配解
paretomat =
-0.00227284102228413 0.0712188161550257 -0.0163216279512607 0.0223268028879513 0.03405075873276
-0.00978636830453622 0.170156524714462 -0.00723451433058267 0.0182846191284416 0.0771681625528947
-0.0176101654801064 -0.0159523975594723 -0.00302200380115747 -0.00849832458300534 -0.0324966912535463
-0.0419332201068704 0.0746825423487237 -0.0563764778122908 -0.0524243448303948 -0.0229788168721254
-0.0554839057394384 -0.0989784771813438 -0.0262242055862137 0.0297280418138594 -0.000227264370436242
-0.0776369060456135 0.00216881072591707 -0.0702366970770566 -0.102944631440041 -0.217642861858831
-0.0800190754495594 0.0233548532432994 -0.131623720484054 -0.0668297989337753 -0.0185859224973561
-0.0983626982392394 -0.048037643077243 -0.0692611671055516 -0.0529905948017304 -0.0609328036656522
-0.105760339390864 -0.0347358884736846 -0.0892373267932827 -0.0545751682409862 0.0407188033358694
-0.125033787402079 -0.131232202936618 -0.141447071858335 -0.172444620296566 -0.168915834021728
-0.188399920778113 -0.119726577587646 -0.197052439456695 -0.139812180253481 -0.111490249458453
-0.189019350743697 -0.144860818694586 -0.192348693379104 -0.179658414736104 -0.141473793690724
-0.214940684352413 -0.190635157923252 -0.180726899336942 -0.182491821843856 -0.155094670744462
-0.224468241501541 -0.227546563527362 -0.260585401957969 -0.265522548982672 -0.233156930268307
-0.259084486658183 -0.195921556728781 -0.29153143335854 -0.231227768412947 -0.176736149549026
-0.385640587641675 -0.405131975319977 -0.383266402124398 -0.378920251924422 -0.362410294125239
-0.409708206256663 -0.232258263008486 -0.383276198073093 -0.387622420293001 -0.404531363301304
0.0266622627949854 0.0199937608076338 0.1020344140958 0.16462373320381 0.335206887783278
0.029252090464726 0.040560254090536 0.0582231007878223 0.0772952250813304 0.0143580767172984
0.0523711335156912 0.00916152080864516 0.104635526130941 0.0906404136369576 0.129224191514728
0.0634041083085849 0.111252555481021 0.0695940580687484 0.0953555138623883 0.124797310908963
0.0768012955752901 0.0888719244083341 0.076244376622001 0.0273308115915742 0.0763923948232536
0.0773288220286295 0.0534328982763007 0.12090850599578 0.14178695686211 0.124222179286853
0.0867509132221776 0.0699405325222435 0.125072236606695 0.0312453154029308 0.0272014961143899
0.089475649803505 0.0291507738967921 0.0765259423071948 0.0147511082690438 0.0909264711466479
0.148789021129548 0.161174452260867 0.166142427712131 0.173501657183426 0.196366758068039
0.151315789987184 0.0688968682546646 0.200197186970212 0.103900972227278 0.0378663627411232
0.157245805067246 0.15882761519839 0.185975998293083 0.130233154440741 0.188752564844483
0.16142983238422 0.195238405764086 0.194463073952494 0.16959756042971 0.0874732116423768
0.22245205415835 0.269650371838859 0.224140784075583 0.246205835016685 0.274971785453224
0.225154322749349 0.208181362098171 0.249976110858735 0.278973450904965 0.177928756027206
0.230231006144887 0.235171902542444 0.266234156364099 0.274764469150482 0.174615593267893
0.236626509303455 0.236665306073303 0.256782832006794 0.296167489627297 0.305962623989305
0.2477228921018 0.298320394377546 0.289268192825444 0.315014091405021 0.352339375907663
0.266947443396633 0.324382171096344 0.328350838090562 0.335921585226187 0.235513723671755
0.278973420929827 0.304392708688683 0.282276552822378 0.289283667760178 0.293413794959001
0.292384979308659 0.284785782539692 0.339886915529597 0.313743643095613 0.320354289049389
0.363243384937082 0.379846924117677 0.351984258497255 0.331709064688054 0.347154150516659
0.518632240891831 0.52936147168219 0.498201970418901 0.474523098342005 0.397491700185792
>>
完整代码见: https://download.csdn.net/download/corn1949/89218695








![[CISCN 2022 东北]hana 题解(易语言逆向)](https://img2024.cnblogs.com/blog/3317193/202404/3317193-20240428230637868-923177797.png)