MATLAB 控制系统设计与仿真 - 34
多变量系统知识回顾 - MIMO system
这一章对深入理解多变量系统以及鲁棒分析至关重要
首先,对于如下系统:
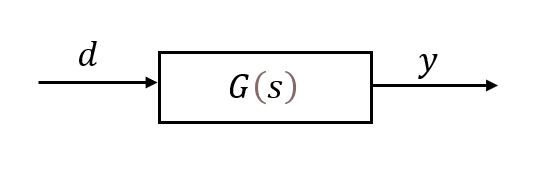
当G(s)为单输入,单输出系统时:
如果:
则:
所以
因此,对于SISO,系统的增益跟w有关系,
当G(s)为MIMO时,例如2X2时,
假设输入信号为:
输出信号为:
则:
对于MIMO,系统的输入和输出均为矢量矩阵,所以系统的增益为:
因此对于MIMO,根据上式可知,系统的增益跟输入信号的方向有关系。
下面用具体的实例来进一步说明。
例如:
根据:
可知:
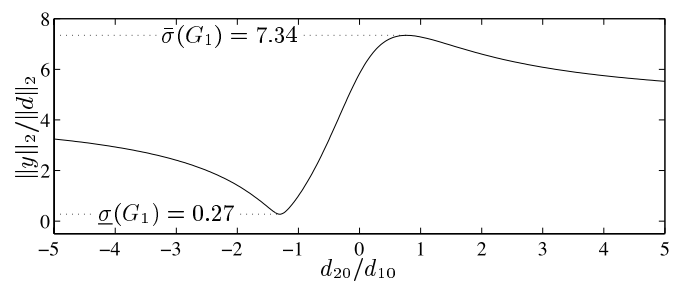
其中,在系统的响应中
为G的最大singular value,
为G的最小singular value
用MATLAB求取矩阵的singular value的代码如下:
clear all;clc;
G1=[5 4; 3 2];
[U S V]=svd(G1)程序运行结果如下:
U =-0.8718 -0.4899-0.4899 0.8718S =7.3434 00 0.2724V =-0.7937 0.6083-0.6083 -0.7937
所以:
如果取横坐标为:,纵坐标为:
,我们可以得到如下图示结果:
如果G是一个传递函数呢?
例如:,我们可以利用MATLAB得到在一定频率范围内,系统的最大相应。
MATLAB 代码如下:
clear all;clc;
s=tf('s');
G=[1/(s^2+2*s+100) 1/(s+50); 1/s+10 1/(s+300)];
sigma(G)
grid on程序运行结果如下:
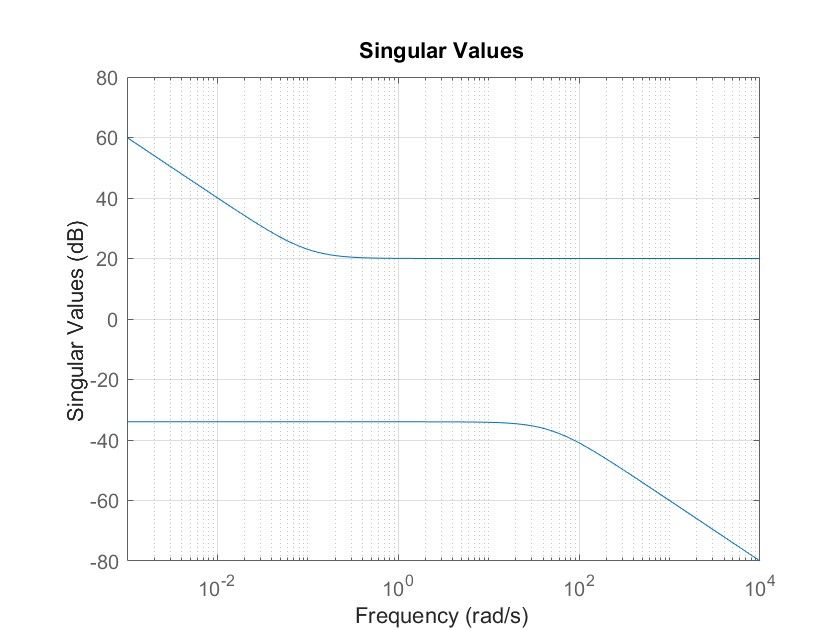
根据上述结果,我们可以知道在频率大于1rad/s时,系统的最大相应为20dB。
接下来我们将引入鲁棒分析的设计概念。
最后,欢迎大家有问题给我留言。
非常感谢小伙伴们的-点赞-收藏-加关注。