cmake(11):list 选项 排序 SORT,定义宏 add_definitions,cmake 里预定义的 8 个宏
(28)list 选项 排序 SORT、

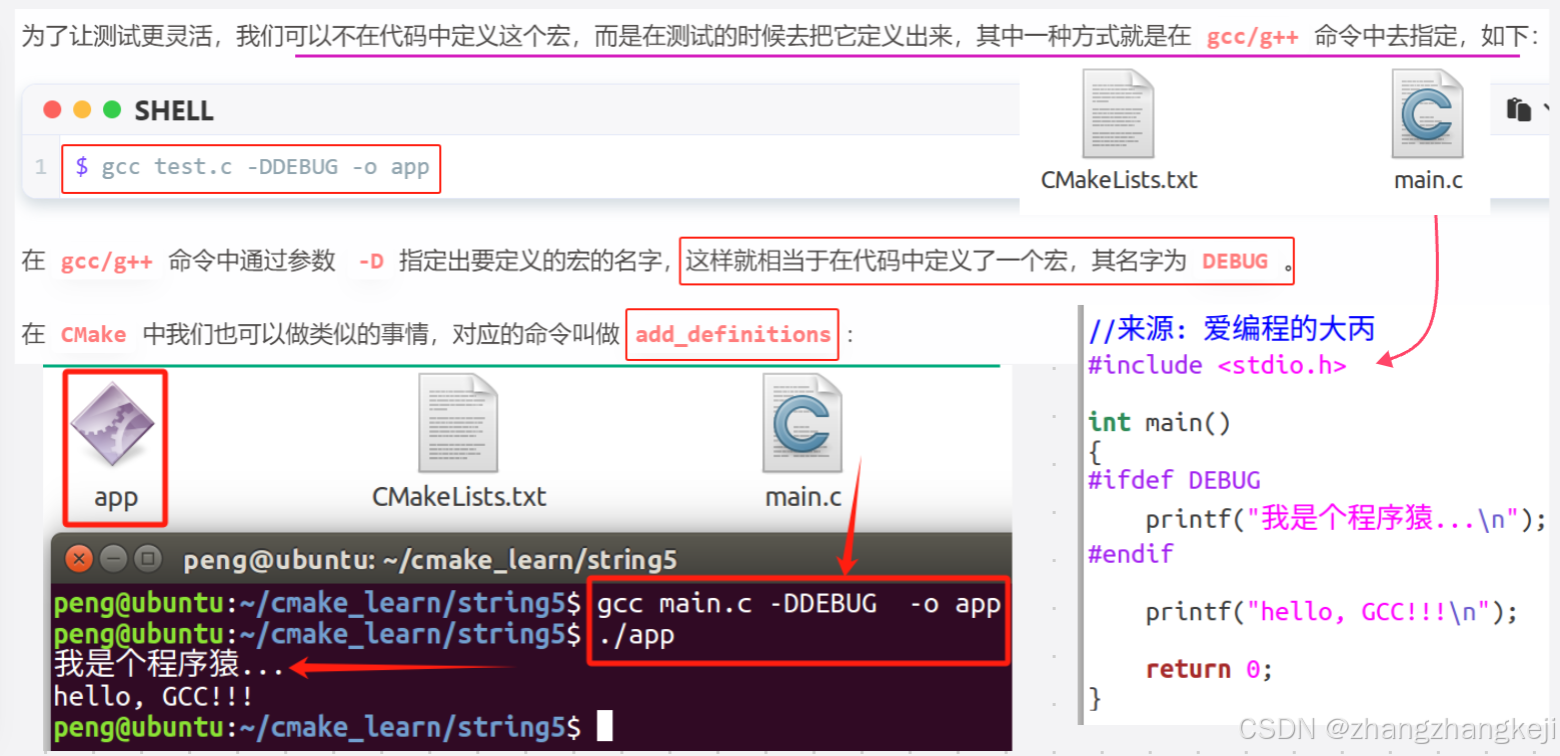
(29) 在 cmake 里定义宏 add_definitions ,在调试模式与版本控制时可以定义 DEBUG 宏,在发布时候,就不打印这些日志输出了:

++ 使用 gcc 命令, $ gcc test.c -DDEBUG -o app :
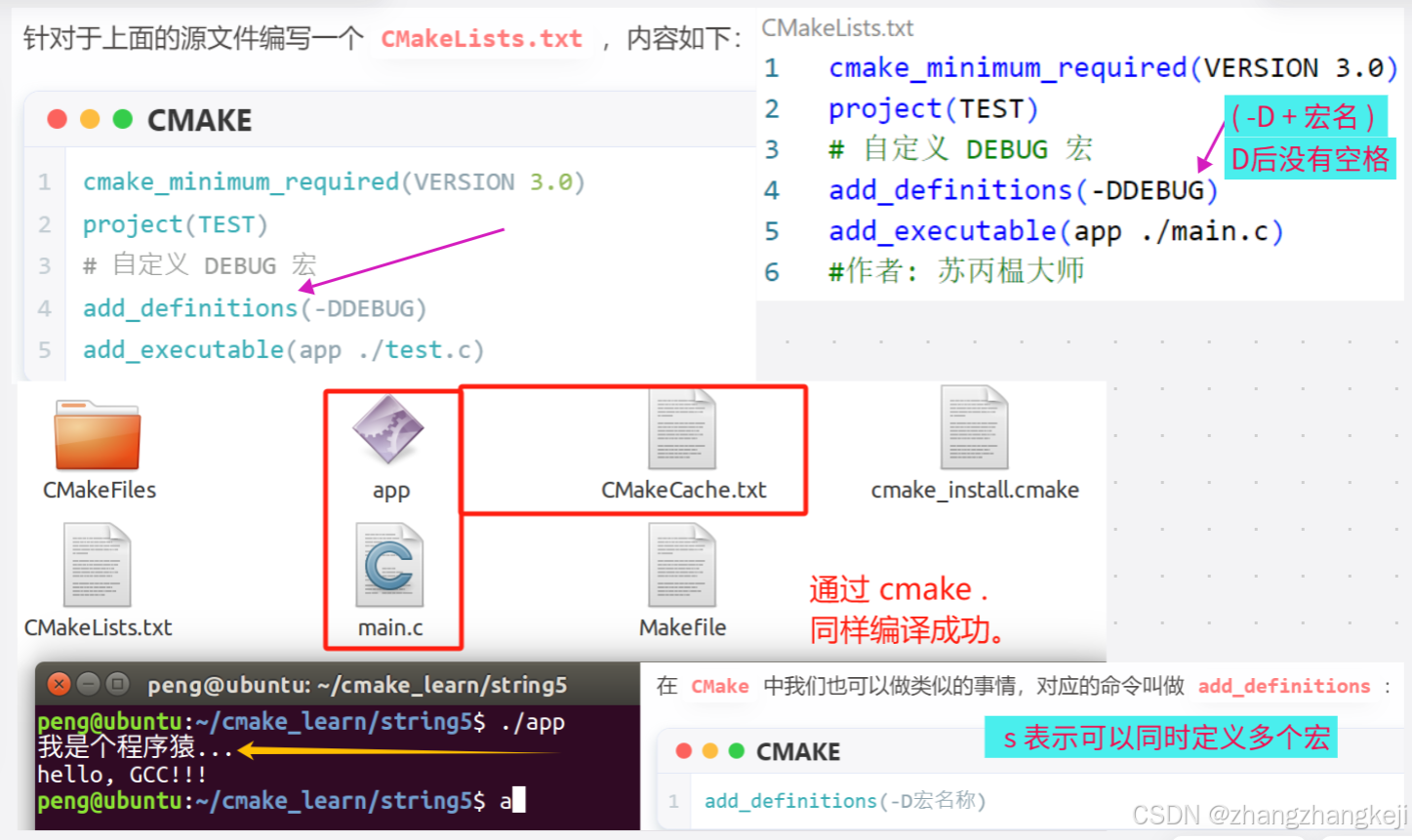
++ 使用 cmake 里的语法:

++ 以及:
(30)cmake 里预定义的 8 个宏 :

(31)
谢谢