Verilog:I2C控制器
目录
一、I2C 通信协议
(1)简介
(2)时序
二、Verilog 实现
(1)设计要求
(2)设计要点
(3)模块完整代码
三、功能验证
(1)写数据
(2)读数据
一、I2C 通信协议
(1)简介
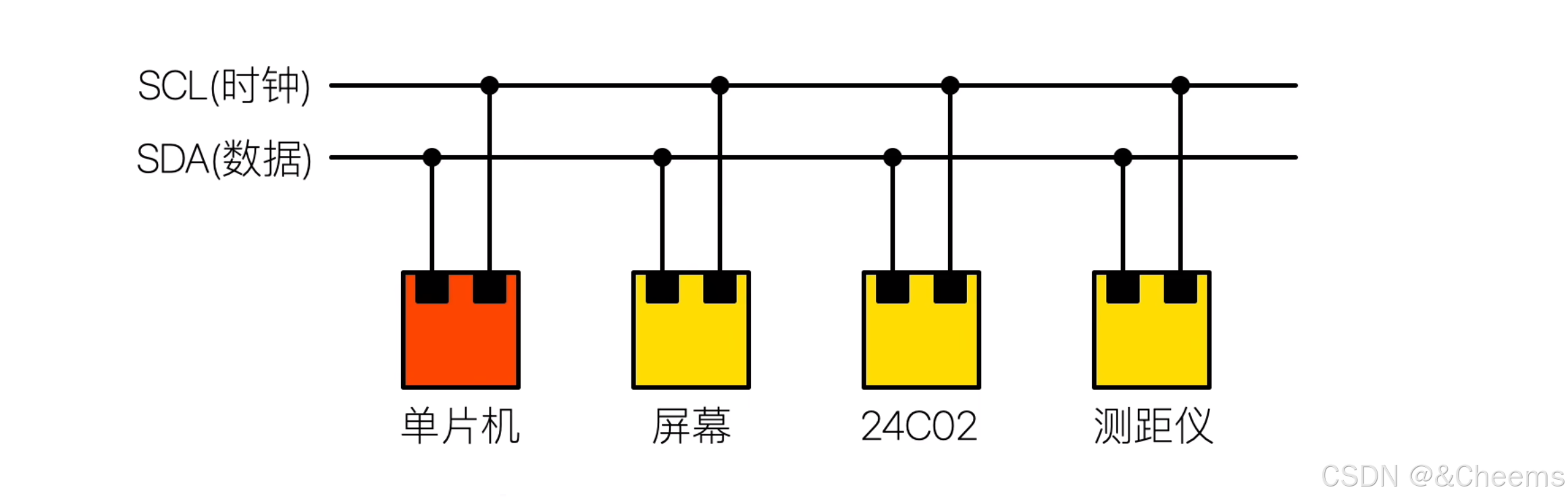
I2C 或 IIC(Inter-Integrated Circuit)是一种串行通信协议,通常用于微控制器、传感器和其他集成电路之间的短距离通信。主要用于在主设备(Master)和从设备(Slave)间传输数据。通常支持多种速率,通常标准模式100 kbps 和快速模式 400 kbps,高速模式3.4 mbps。
I2C 使用两根线进行通信:SDA(Serial Data Line) 数据线、SCL(Serial Clock Line)时钟线,由主设备生成,用于同步数据传输。I2C 地址寻址:I2C设备由唯一的地址标识,通常为7位。主设备通过地址选择特定的从设备进行通信。(注意:总线有上拉电阻,这里示意图省略了)
(2)时序
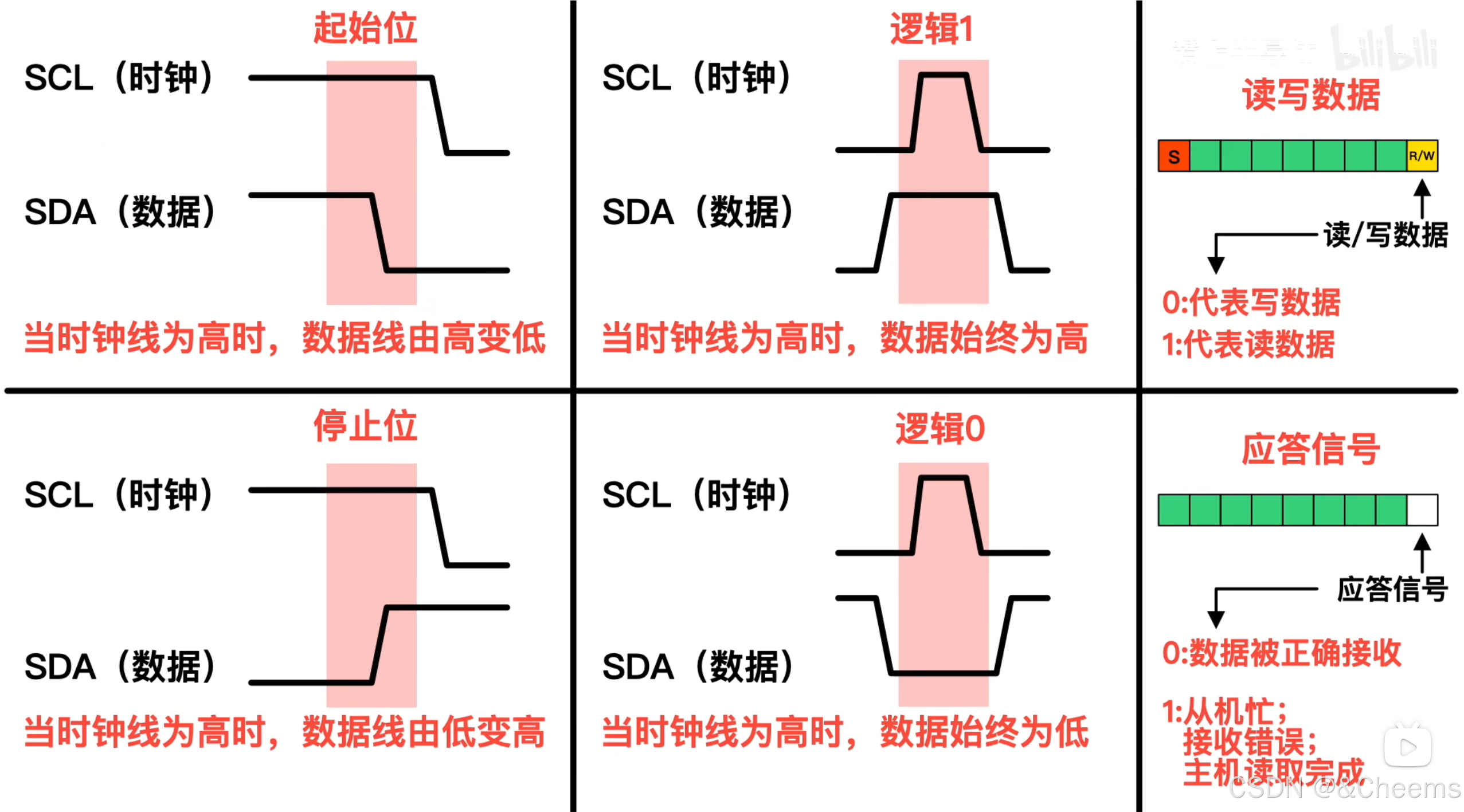
本文简单介绍 I2C 单字节读写时序。起始位、停止位、读写数据、应答的时序规范如下图所示,同时需要注意以下几点:
1.SCL和SDA 空闲时均为高电平(高阻态+上拉)
2.读命令为1、写命令为0
3. ACK应答由从设备发送,0表示从设备接收成功,主设备可继续发送数据。
4.NACK无应答由主设备发送,1表示数据读取结束。
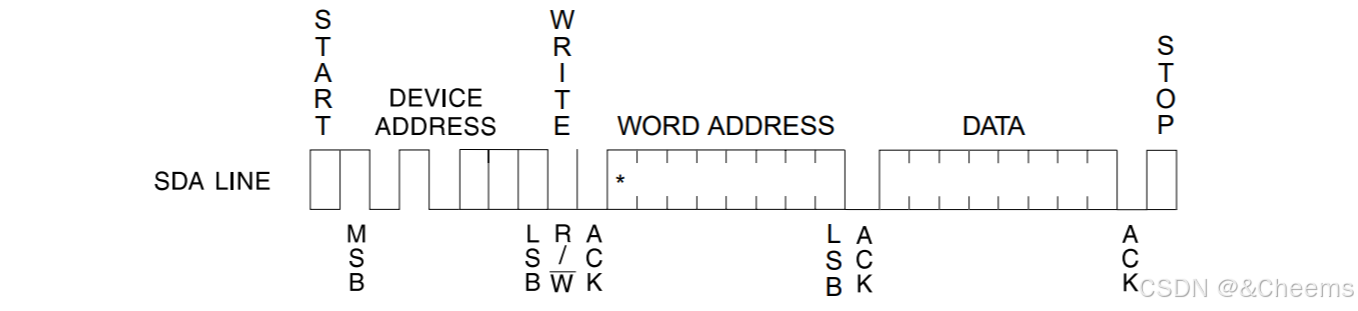
(单字节)写时序 :Byte Write
主设备向从设备特定地址写入数据,sda数据线上依次为:起始位、7bit从地址+写命令0、应答1、8bit字节地址、应答2、8bit写入数据、应答3、停止位
(随机)读时序 :Random Read
主设备读取从设备特定地址数据,sda数据线上依次为:起始位、7bit从设备地址+写命令0、应答1、8bit字节地址、应答2、起始位2、7bit从设备地址+读命令1、应答3、8bit读取数据、无应答、停止位
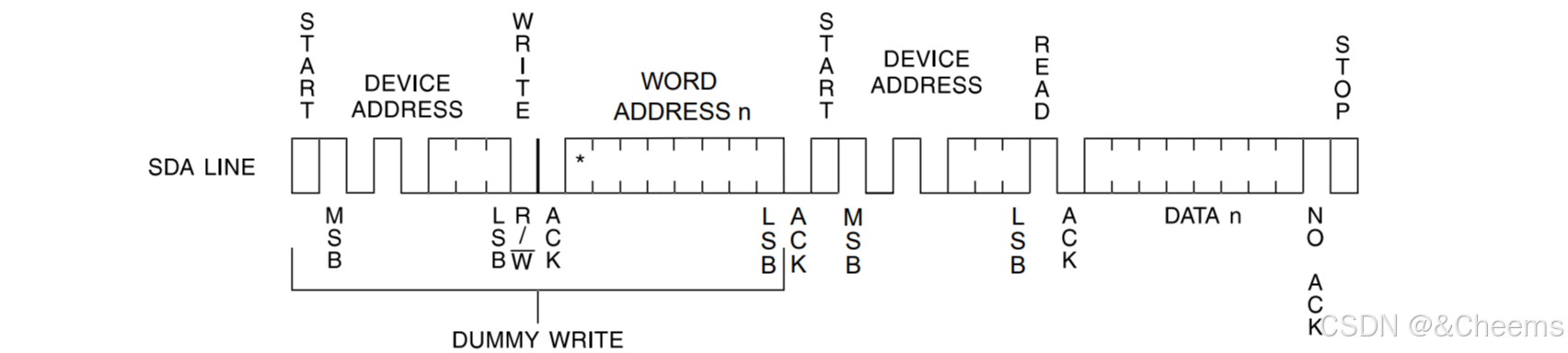
(蓝色表示读写操作都有的公共状态,红色表示各自的特殊状态,如此区分方便后面状态机的设计)
二、Verilog 实现
(1)设计要求
1. 实现对 EEPROM(AT24C02)的单字节读写操作
2. I2C速度采用快速模式(400KHz,即AT24C02支持最大频率)

(2)设计要点
1.sda双向端口
sda是双向信号,既可以做输入也可以做输出。因此在 Verilog 中应声明为 “inout ” 类型。对这类信号需要一个控制信号进行输入输出控制,便定义 sda_oe(sda output enable)当 sda_oe 为1时表示sda作输出 ,反之作输入。
sda作输出:根据I2C协议规范,当sda要输出高电平时只需要保持高阻态1’bz即可,因为总线有上拉电阻,高阻态+上拉电阻即为高电平。而低电平则正常输出1’b0。但是不能直接对sda进行赋值,需要一个寄存器 sda_out 来间接控制,sda_out 为1表示输出z,为0表示输出0。
sda作输入:此时sda需要保持为高阻态以确保主设备不会影响从设备对于sda信号的控制作,即对外呈高阻态确保总线信号互不干扰。同样由于inout类型信号的特殊性,不可以直接读取sda,可以定义一个 wire 类型的 sda_in 来传输sda的值,需要读取sda时可以通过sda_in获取。
综上所述,用Verilog语言进行描述:
module i2c_ctrl(inout wire sda, //双向数据线(inout)......
);
reg sda_oe; //sda输出使能,为1表示sda作输出
reg sda_out; //sda输出信号线
wire sda_in; //sda输入寄存器
assign sda_in = sda; //sda作输入直接读
assign sda = sda_oe ? (sda_out ? 1'bz : 1'b0) : 1'bz;
//作输入需确保总线信号互不干扰对外呈高阻态,空闲和输出1时输出高阻态,因为sda线有上拉电阻
2.scl时钟信号
scl信号在空闲时同样保持高电平,只有在i2c工作时产生工作时钟信号,其频率决定了即为数据传输速度,本次设计速度采用400KHz,因此设计一个分频计数器对100MHz系统时钟clk进行分频,且该分频器只在i2c工作时(work_en=1)产生分频时钟信号 clk_div 。
此外还定义了三个信号线 wire scl_half_1、wire scl_half_0、wire scl_ack_jump,他们分别对应 scl 时钟的高电平中点时刻、低电平中点时刻、高电平中点前5个clk时刻。这些时刻为数据读取、数据输出、应答位状态跳转时刻。
//---------------------------------FPGA系统时钟clk频率为100MHz
wire scl_half_1;
wire scl_half_0;
wire scl_ack_jump;
assign scl_half_1 = (cnt_clk == cnt_max_400khz >> 1 && clk_div==1'b1); //scl高电平中点(起始位、ACK接收、读数据、停止位时刻)
assign scl_half_0 = (cnt_clk == cnt_max_400khz >> 1 && clk_div==1'b0); //scl低电平中点(写数据时刻)
assign scl_ack_jump=((cnt_clk ==(cnt_max_400khz >> 1)-5) && clk_div==1'b0); //scl低电平中点前5clk周期---
//---(ACK状态的下一状态跳转时刻,因为跳转都是由输入转输出状态,快一周期让输出状态赶上紧跟着的第一个scl_half_0,避免错过第1位数据)//分频计数器(400khz时钟scl)
always @(posedge clk or negedge rst_n) beginif (!work_en || !rst_n) begincnt_clk <= 8'd1;clk_div <= 1'b1;end else if (cnt_clk == cnt_max_400khz) begincnt_clk <= 8'd1;clk_div <= ~clk_div;end else cnt_clk <= cnt_clk + 8'd1;
end
assign scl = clk_div;3.状态机
在时序部分介绍了读/写操作的各个状态,不难发现从第一个起始位到应答位2均为公共状态(起始位、7bit从设备地址+写命令0、应答1、8bit字节地址、应答2),且特殊状态都是在 应答2这一状态进行区分的,因此可以设计一个rw_ctrl信号来区分读写操作,rw_ctrl = 0表示写操作,1表示读操作,使状态机进入不同的状态分支,最后都回到停止位状态。(此外若从设备应答失败即ack=1会跳转至空闲状态停止工作)
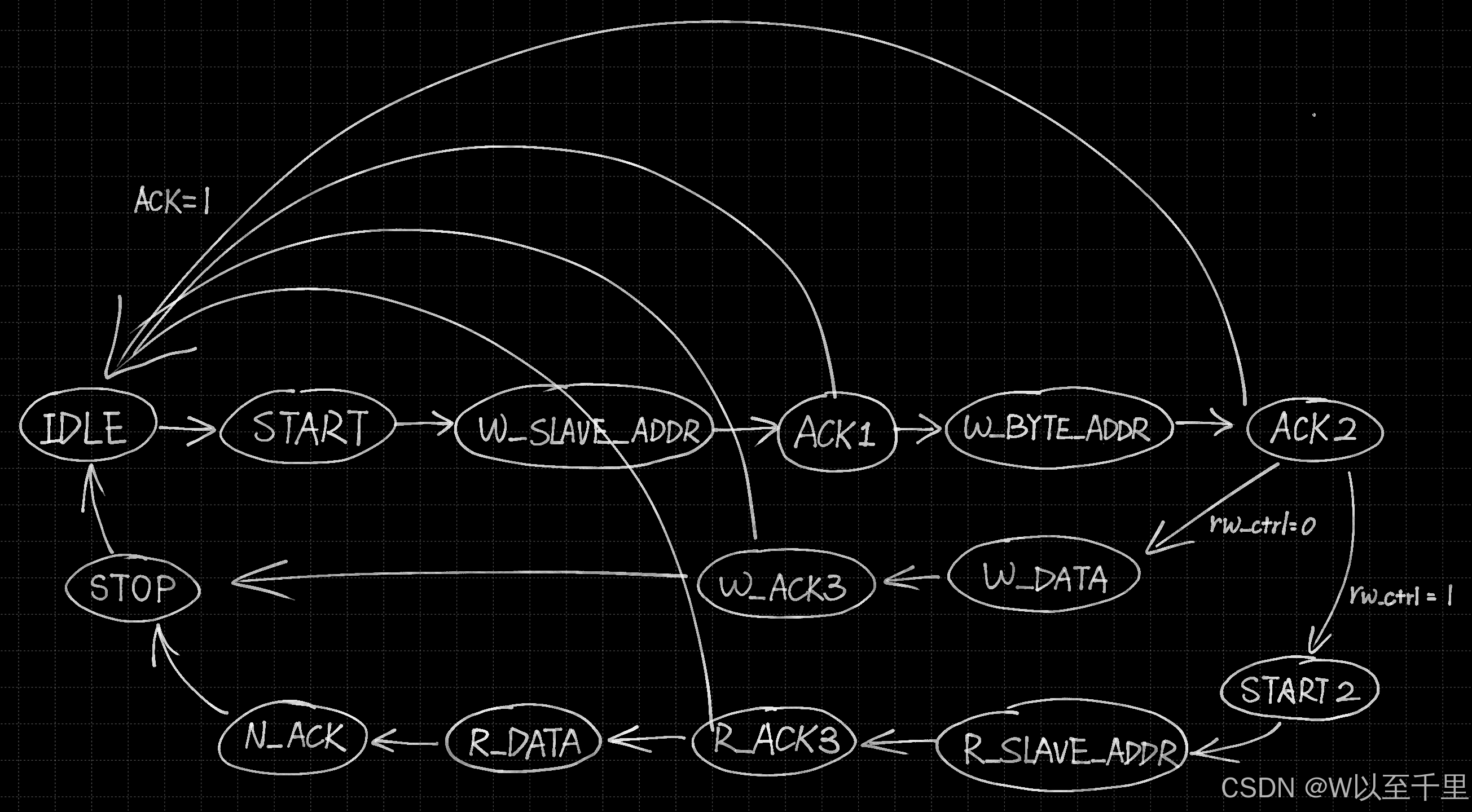
//状态机参数
reg [3:0] state; //当前状态
reg [3:0] next_state; //下一状态
localparam //--------------------------------------------公共状态IDLE = 4'd0, //空闲START = 4'd1, //起始位W_SLAVE_ADDR = 4'd2, //写7位从设备地址+写命令0ACK1 = 4'd3, //应答1W_BYTE_ADDR = 4'd4, //写8位字地址ACK2 = 4'd5, //应答2(状态转移时进行读写判断)STOP = 4'd6, //停止位//--------------------------------------------写操作特殊状态W_DATA = 4'd7, //写8位数据位W_ACK3 = 4'd8, //写应答3 //--------------------------------------------读操作特殊状态START2 = 4'd9, //读操作第2次起始位 R_SLAVE_ADDR = 4'd10, //写7位从设备地址+读命令1 R_ACK3 = 4'd11, //读应答3 R_DATA = 4'd12, //读8位数据位 N_ACK = 4'd13; //无应答(3)模块完整代码
结合以上要点,最终的i2c_ctrl模块代码设计如下:(work_start为启动信号,i2c模块接收到一个高电平脉冲开始工作,work_done为工作结束信号,读/写完成产生一个高电平脉冲)
`timescale 1ns / 1ps
module i2c_ctrl(input wire clk, //系统时钟100MHzinput wire rst_n, //复位inout wire sda, //双向数据线(inout)output wire scl, //输出时钟线input wire rw_ctrl, //读写使能信号(0写1读)input wire work_start, //i2c启动信号input wire [6:0] slave_addr, //7bit从设备地址input wire [7:0] byte_addr, //8bit字地址 input wire [7:0] w_data, //8bit待写数据output reg [7:0] r_data, //8bit读取数据output reg work_done //i2c读写完成信号
);
//sda传输方向控制
reg sda_oe; //sda输出使能,为1表示sda作输出
reg sda_out; //sda输出信号线
wire sda_in; //sda输入寄存器
assign sda_in = sda; //sda作输入直接读
assign sda = sda_oe ? (sda_out ? 1'bz : 1'b0) : 1'bz; //作输入需确保总线信号互不干扰对外呈高阻态,空闲和输出1时输出高阻态,因为sda线有上拉电阻//状态机参数
reg [3:0] state; //当前状态
reg [3:0] next_state; //下一状态
localparam //--------------------------------------------公共状态IDLE = 4'd0, //空闲START = 4'd1, //起始位W_SLAVE_ADDR = 4'd2, //写7位从设备地址+写命令0ACK1 = 4'd3, //应答1W_BYTE_ADDR = 4'd4, //写8位字地址ACK2 = 4'd5, //应答2(状态转移时进行读写判断)STOP = 4'd6, //停止位//--------------------------------------------写操作特殊状态W_DATA = 4'd7, //写8位数据位W_ACK3 = 4'd8, //写应答3 //--------------------------------------------读操作特殊状态START2 = 4'd9, //读操作第2次起始位 R_SLAVE_ADDR = 4'd10, //写7位从设备地址+读命令1 R_ACK3 = 4'd11, //读应答3 R_DATA = 4'd12, //读8位数据位 N_ACK = 4'd13; //无应答//计数器及参数
reg clk_div;
reg [7:0] cnt_clk; //分频计数
reg [3:0] cnt_bit; //位计数器
localparam cnt_max_400khz = 8'd125; //400khz分频翻转计算值
wire scl_half_1;
wire scl_half_0;
wire scl_ack_jump;
assign scl_half_1 = (cnt_clk == cnt_max_400khz >> 1 && clk_div==1'b1); //scl高电平中点(起始位、ACK接收、读数据、停止位时刻)
assign scl_half_0 = (cnt_clk == cnt_max_400khz >> 1 && clk_div==1'b0); //scl低电平中点(写数据时刻)
assign scl_ack_jump=((cnt_clk ==(cnt_max_400khz >> 1)-5) && clk_div==1'b0); //scl低电平中点前5clk周期---
//---(ACK状态的下一状态跳转时刻,因为跳转都是由输入转输出状态,快一周期让输出状态赶上紧跟着的第一个scl_half_0,避免错过第1位数据)//数据寄存器
reg [7:0] w_data_buf; //写入数据寄存器
reg [7:0] r_data_buf; //读出数据寄存器
reg [7:0] w_slave_addr_buf; //从设备地址寄存器(地址存高7位,0位为写命令0)
reg [7:0] r_slave_addr_buf; //从设备地址寄存器(地址存高7位,0位为读命令1)
reg [7:0] byte_addr_buf; //字地址寄存器
reg ack_buf; //接收应答位寄存器
reg work_en; //工作使能信号//*************************************** MAIN CODE ***************************************//
//数据复位、开始工作时寄存数据(避免传输中途数据不稳定)
always @(posedge clk or negedge rst_n) beginif (!rst_n) beginw_slave_addr_buf <= 8'b0000_0000;//0位为写命令0r_slave_addr_buf <= 8'b0000_0001;//0位为读命令1byte_addr_buf <= 8'b0;w_data_buf <= 8'b0;end else if (work_start) beginw_slave_addr_buf [7:1] <= slave_addr; //地址存高7位r_slave_addr_buf [7:1] <= slave_addr; //地址存高7位w_data_buf <= w_data;byte_addr_buf <= byte_addr;end
end//分频计数器(400khz时钟scl)
always @(posedge clk or negedge rst_n) beginif (!work_en || !rst_n) begincnt_clk <= 8'd1;clk_div <= 1'b1;end else if (cnt_clk == cnt_max_400khz) begincnt_clk <= 8'd1;clk_div <= ~clk_div;end else cnt_clk <= cnt_clk + 8'd1;
end
assign scl = clk_div;//两段式状态机
always @(posedge clk or negedge rst_n) begin //state状态转移if (!rst_n) state <= IDLE;else state <= next_state;
end
always @(posedge clk or negedge rst_n) begin //state状态执行操作if (!rst_n) beginsda_oe <= 1'b0;//sda默认不使能输出(高阻态经上拉为1)sda_out <= 1'b1;//sda默认输出1避免输出0work_en <= 1'b0;work_done <= 1'b0;cnt_bit <= 4'd0;next_state <= IDLE;end elsecase(state)//---------------------空闲----------------------//IDLE: beginsda_oe <= 1'b0;sda_out <= 1'b1; work_done <= 1'b0; if (work_start) begin //开始工作work_en <= 1'b1; //工作使能信号work_en(工作时持续为1)next_state <= START;endend //--------------------起始位1--------------------//START: beginsda_oe <= 1'b1;//sda输出使能if (scl_half_1) beginsda_out <= 1'b0;//sda输出起始位0next_state <= W_SLAVE_ADDR;endend//--------------7bit从地址+写命令0---------------//W_SLAVE_ADDR: beginsda_oe <= 1'b1;//sda输出使能if (scl_half_0) beginif (cnt_bit != 4'd8) beginsda_out <= w_slave_addr_buf[7-cnt_bit];//sda输出设备地址(从高到低)cnt_bit <= cnt_bit + 4'd1;end else beginnext_state <= ACK1;cnt_bit <= 4'd0;endendend//--------------------应答1---------------------//ACK1: begin sda_oe <= 1'b0;//sda输出失能作输入if (scl_half_1) ack_buf <= sda_in;if (scl_ack_jump) if (ack_buf==1'b0) //应答位判断next_state <= W_BYTE_ADDR;else beginwork_en <= 1'b0;next_state <= IDLE;end end//-----------------8bit字节地址-----------------//W_BYTE_ADDR: beginsda_oe <= 1'b1;//sda输出使能if (scl_half_0) beginif (cnt_bit != 4'd8) beginsda_out <= byte_addr_buf[7-cnt_bit];//sda输出字节地址(从高到低)cnt_bit <= cnt_bit + 4'd1;end else beginnext_state <= ACK2;cnt_bit <= 4'd0;endendend//--------------------应答2---------------------//ACK2: beginsda_oe <= 1'b0;//sda输出失能作输入if (scl_half_1) ack_buf <= sda_in; if (scl_ack_jump) if (ack_buf==1'b0) //应答位判断next_state = rw_ctrl ? START2 : W_DATA; //读写操作判断(0写1读)else beginwork_en <= 1'b0;next_state <= IDLE;end end //--------------------停止位--------------------//STOP: beginsda_oe <= 1'b1;//sda输出使能if (scl_half_1) beginsda_out <= 1'b1;work_done <= 1'b1;//工作结束信号置1(在STOP转IDLE时清0)work_en <= 1'b0;//工作使能信号置0next_state <= IDLE;endend//----------------写操作特殊状态-----------------////-----------------8bit写入数据-----------------//W_DATA: begin sda_oe <= 1'b1;//sda输出使能if (scl_half_0) beginif (cnt_bit != 4'd8) beginsda_out <= w_data_buf[7-cnt_bit];//sda输出写入数据(从高到低)cnt_bit <= cnt_bit + 4'd1;end else beginnext_state <= W_ACK3;cnt_bit <= 4'd0;endendend//-------------------写应答3--------------------//W_ACK3: begin sda_oe <= 1'b0;//sda输出失能作输入if (scl_half_1) ack_buf <= sda_in; if (scl_ack_jump) if (ack_buf==1'b0) begin //应答位判断sda_out <= 1'b0; //停止位要输出0跳1,转状态时提前置0next_state <= STOP;end else beginwork_en <= 1'b0;next_state <= IDLE;end end //----------------读操作特殊状态-----------------////-------------------起始位2--------------------//START2: beginsda_oe <= 1'b1;//sda输出使能if (scl_half_1) beginsda_out <= 1'b0;//sda输出起始位0next_state <= R_SLAVE_ADDR;endend//--------------7bit从地址+读命令1---------------//R_SLAVE_ADDR: beginsda_oe <= 1'b1;//sda输出使能if (scl_half_0) beginif (cnt_bit != 4'd8) beginsda_out <= r_slave_addr_buf[7-cnt_bit];//sda输出设备地址(从高到低)cnt_bit <= cnt_bit + 4'd1;end else beginnext_state <= R_ACK3;cnt_bit <= 4'd0;endendend//-------------------读应答3--------------------//R_ACK3: begin sda_oe <= 1'b0;//sda输出失能作输入if (scl_half_1) ack_buf <= sda_in; if (scl_ack_jump) if (ack_buf==1'b0) //应答位判断next_state <= R_DATA;else beginwork_en <= 1'b0;next_state <= IDLE;end end //-----------------8bit读取数据-----------------//R_DATA: beginsda_oe <= 1'b0;//sda输出失能作输入if (scl_half_1 && cnt_bit!=4'd8) begin r_data_buf[7-cnt_bit] <= sda_in;//sda在scl高电平中点读取数据(从高到低)cnt_bit <= cnt_bit + 4'd1;end if (scl_ack_jump && cnt_bit==4'd8) begin //提前转状态,因为无应答会在scl_half_0输出 next_state <= N_ACK;cnt_bit <= 4'd0;r_data <= r_data_buf;//从寄存器取出读取的数据endend//--------------------无应答--------------------// N_ACK: begin sda_oe <= 1'b1;//sda输出使能if (scl_half_0)sda_out <= 1'b1;if (scl_ack_jump) beginsda_out <= 1'b0;//停止位要输出0跳1,转状态时提前置0next_state <= STOP;end enddefault: next_state <= IDLE;endcase
end
endmodule三、功能验证
验证方法:
i2c读写EEPROM的仿真有点麻烦,还需一个从设备模块以模拟EEPROM行为。因此我选择直接上板调试:用拨码开关进行读写控制、写入数据设置,按钮发送工作启动信号 (按钮经过软件消抖处理),进行一次写数据操作后再将进行读数据操作,并将数据返回到LED灯上进行验证,同时调用Vivado的ILA进行在线调试,抓取波形检查时序。(关于ILA的使用可以参考我的另一篇笔记:Vivado:使用 ILA 进行在线调试)
FPGA开发板上的操作及现象为:
拨码开关设置好待写入数据 F0 (1111_0000),rw_ctrl的拨码开关打向0,按下按钮发送启动信号,向从设备写入数据。接着 rw_ctrl 的拨码开关打向1,再次按下按钮发送启动信号,从从设备读取数,此时LED被立刻点亮,点亮情况为 F0 (1111_0000),说明模块功能成功实现了对EEPROM的读写操作。
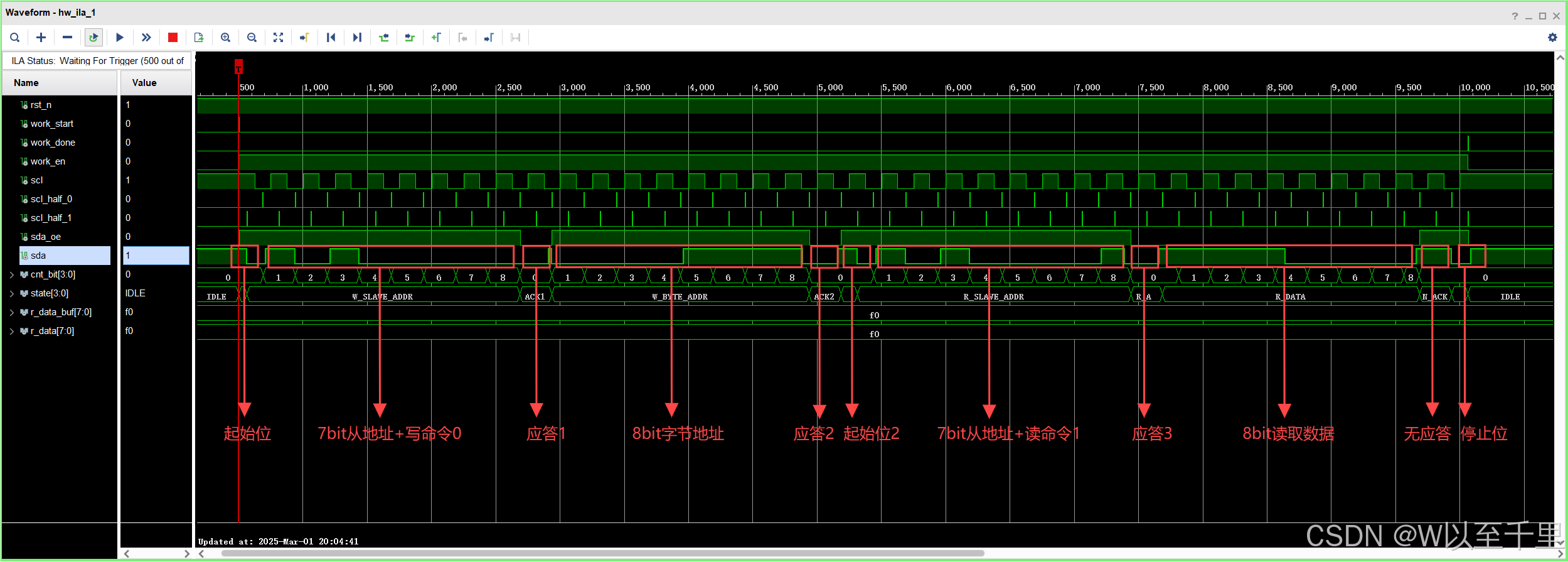
下面对ILA抓取到的波形进行分析:
(1)写数据
向 AT24C02(设备地址7‘b1010000)的地址0F处 写入数据 F0。可以看到sda数据正确传输,同时从设备也正常进行接收应答。(应答位的毛刺个人认为是从设备的应答信号持续时间不够长导致,从设备发送应答后开始接收主设备发送的数据,sda保持高阻态,因此主设备这边接收到了高电平。但并不影响i2c功能,因为sda数据是在scl高电平中点进行接收)

(2)读数据
从 AT24C02(设备地址7‘b1010000)的地址0F处 读取数据。发现主设备成功读取到了之前向从设备写入的数据F0。
到此,所设计i2c模块功能验证结束,成功实现对EEPROM进行读写操作的功能。