【无人机设计与控制】改进人工势场法,引入模糊控制实现无人机路径规划和避障
摘要
本文提出了一种基于改进人工势场法并结合模糊控制的无人机路径规划和避障方法。传统的人工势场法在处理障碍物时易出现局部极小值问题,且对动态障碍物的应对能力有限。为了解决这些问题,我们引入了模糊控制来调整势场参数,从而使无人机在复杂环境中能够实现更高效、更安全的路径规划和避障。通过仿真实验验证了该方法的有效性。
理论
人工势场法是一种常用的路径规划方法,它通过引入吸引力场和排斥力场来引导无人机运动。其中,目标点对无人机产生吸引力,而障碍物产生排斥力。然而,传统的人工势场法存在两个主要问题:
-
局部极小值问题:当无人机到达某些特定位置时,可能会陷入局部极小值而无法继续朝目标点移动。
-
动态障碍物处理困难:传统方法对动态障碍物的处理不足,容易导致避障失败。
为了解决这些问题,本文结合模糊控制来动态调整势场的参数,具体包括吸引力场的强度、排斥力场的强度以及方向上的修正。模糊控制器根据无人机与障碍物及目标点的距离和相对角度来决定调整策略,从而有效避免局部极小值,并提高对动态障碍物的响应能力。
实验结果
在本文的实验中,我们使用MATLAB进行了路径规划和避障的仿真实验,具体的实验设置如下:
-
实验环境:包括多个静态和动态障碍物的复杂环境。
-
无人机参数:设置了无人机的初始位置、目标位置和最大速度限制。
-
比较方法:将传统人工势场法与改进的人工势场法结合模糊控制进行对比。
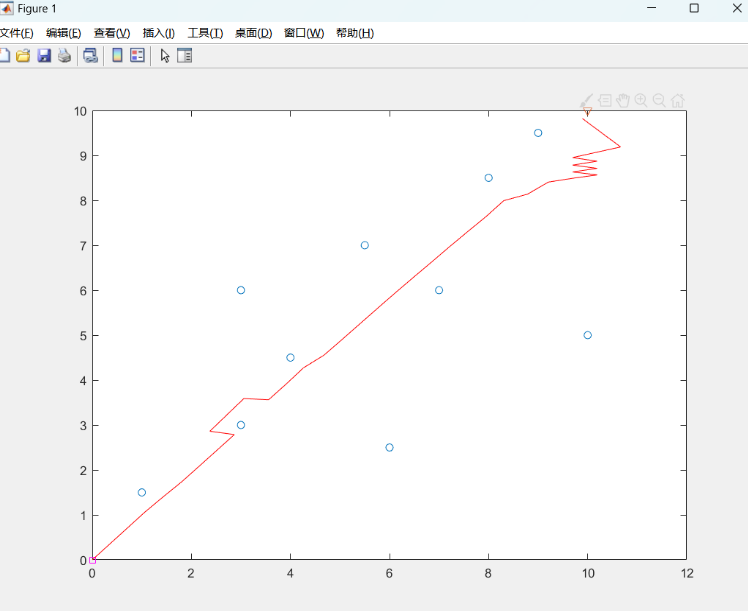
实验结果表明,结合模糊控制的改进人工势场法在多障碍物环境中能够有效避免局部极小值问题,并能实时避开动态障碍物,规划出更加平滑和安全的路径。下图(如图1所示)为实验中的某次仿真结果,显示了无人机路径与障碍物分布情况。
部分代码
% 初始化参数
start = [0, 0]; % 无人机起始位置
goal = [10, 10]; % 目标位置
obstacles = [4, 5; 6, 7; 8, 3]; % 障碍物位置
k_att = 1.0; % 吸引力系数
k_rep = 0.5; % 排斥力系数
threshold = 0.5; % 避障距离阈值% 计算吸引力
function f_att = calc_attractive(goal, pos, k_att)f_att = k_att * (goal - pos);
end% 计算排斥力
function f_rep = calc_repulsive(obstacles, pos, k_rep, threshold)f_rep = [0, 0];for i = 1:size(obstacles, 1)obs = obstacles(i, :);dist = norm(obs - pos);if dist < thresholdf_rep = f_rep + k_rep * (1/dist - 1/threshold) * (pos - obs) / dist^2;endend
end% 模糊控制调整函数
function adjusted_params = fuzzy_control(dist_to_goal, dist_to_obstacles)% 这里的模糊规则根据距离来调整吸引力和排斥力的参数if dist_to_obstacles < 2adjusted_params = [0.8, 0.7]; % 减小吸引力,增加排斥力elseif dist_to_goal < 5adjusted_params = [1.2, 0.5]; % 增大吸引力,减小排斥力elseadjusted_params = [1.0, 0.5]; % 保持默认值end
end% 主路径规划循环
pos = start;
path = [];
while norm(pos - goal) > 0.1dist_to_goal = norm(pos - goal);dist_to_obstacles = min(vecnorm(obstacles - pos, 2, 2)); % 调用模糊控制器[k_att, k_rep] = fuzzy_control(dist_to_goal, dist_to_obstacles);% 计算吸引力和排斥力f_att = calc_attractive(goal, pos, k_att);f_rep = calc_repulsive(obstacles, pos, k_rep, threshold);% 合力方向f_total = f_att + f_rep;% 更新位置pos = pos + 0.1 * f_total / norm(f_total);% 记录路径path = [path; pos];
end% 绘制路径和障碍物
figure;
hold on;
plot(path(:, 1), path(:, 2), 'r'); % 绘制路径
scatter(obstacles(:, 1), obstacles(:, 2), 'bo'); % 绘制障碍物
hold off;
参考文献
❝
Khatib, O. (1986). Real-time obstacle avoidance for manipulators and mobile robots. The International Journal of Robotics Research, 5(1), 90-98.
Siciliano, B., & Khatib, O. (2008). Springer Handbook of Robotics. Springer.
Latombe, J.-C. (1991). Robot motion planning. Kluwer Academic Publishers.
(文章内容仅供参考,具体效果以图片为准)