RTThread-Nano学习一-基于MDK移植
一、简介
关于RTThread-nano的介绍,这里不做过多解释,官方文档已经介绍的非常详细了,有兴趣的可以参考如下文档:RT-Thread 文档中心
二、移植
1.准备一个能正常运行的代码
手头有M0内核的板子,那就以M0内核来进行演示。
代码可正常运行。
2.Nano Pack安装
①在MDK中安装
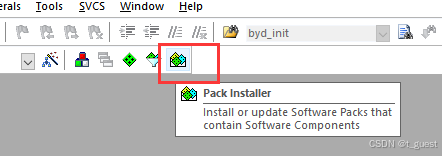
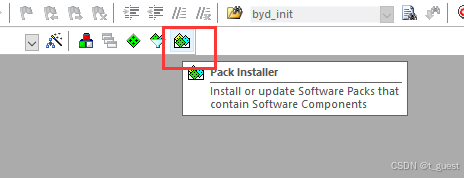
打开MDK软件(keil),点击工具栏的Pack Installer图标。
点击右侧的Pack,展开Generic
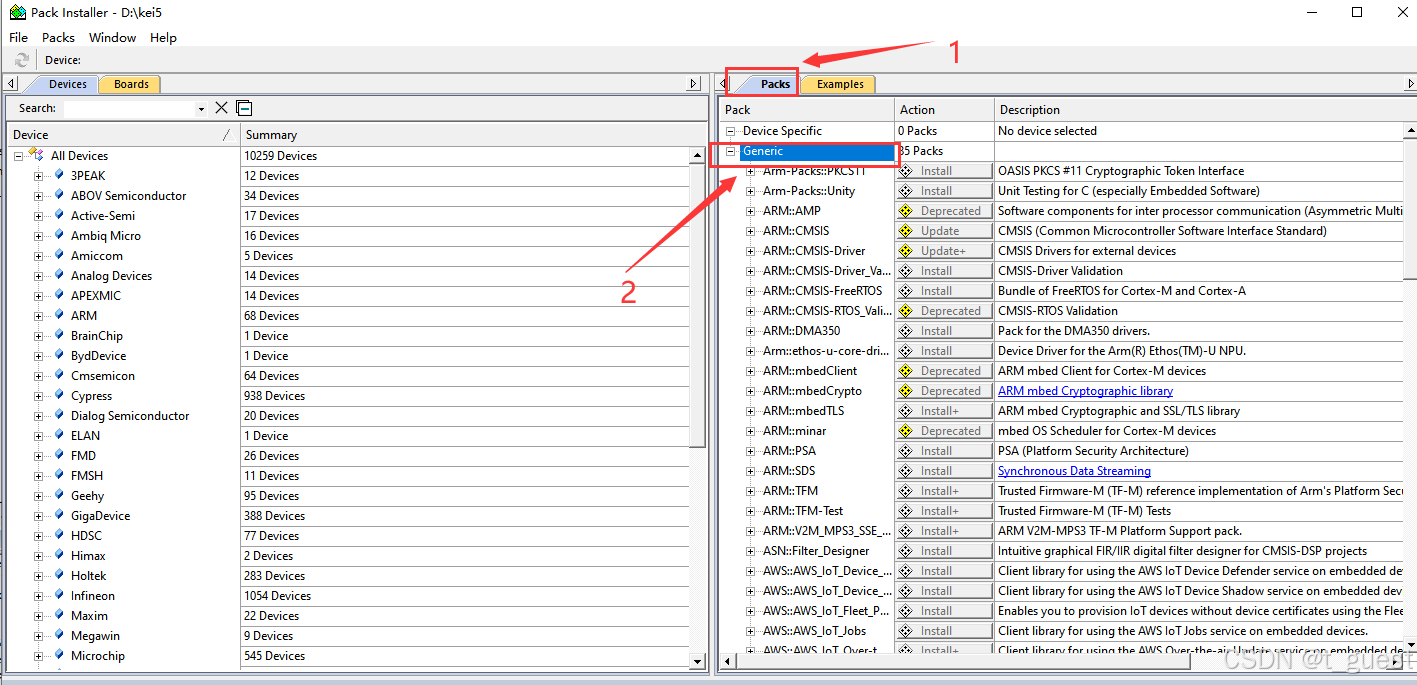
展开RealThread::RT-Thread,点击Install进行安装。
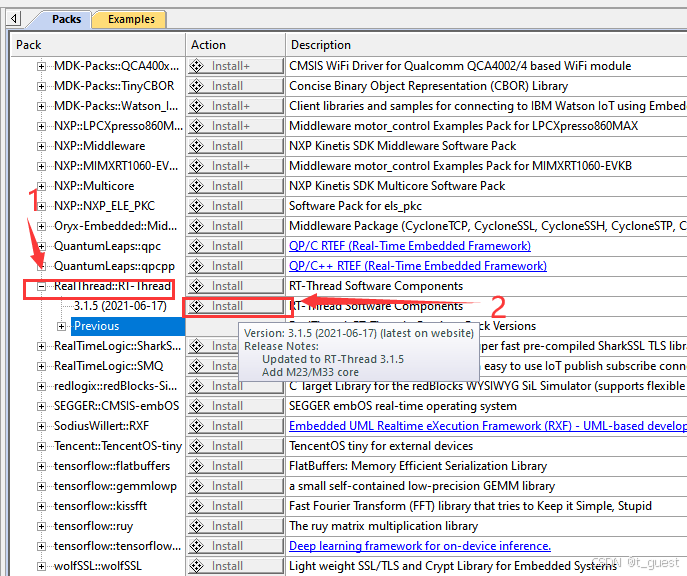
注:如果“install”按键无法点击,可能是因为网络不行,稍作等待,如果还不行,选择②中的手动烧录。
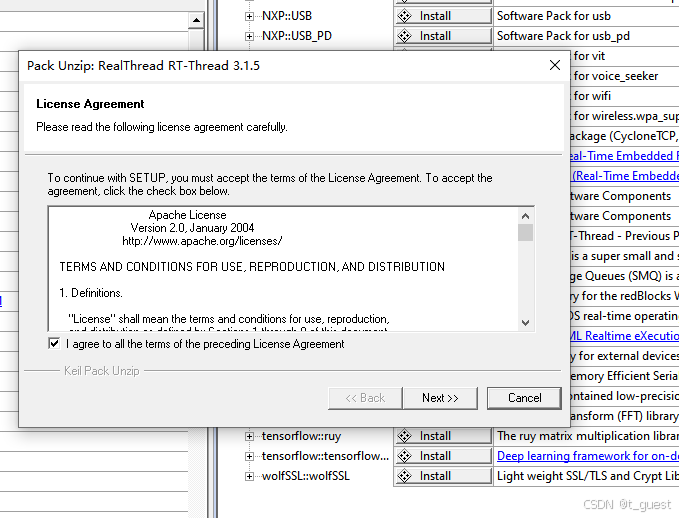
点击“Next”。
安装成功。
②手动安装
从官网下载安装文件。https://www.rt-thread.org/download/mdk/RealThread.RT-Thread.3.1.5.pack
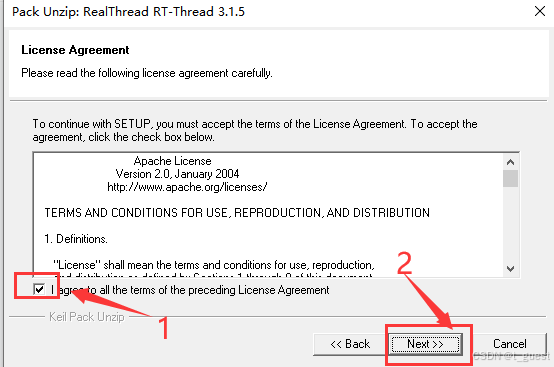
下载完成后,双击下载文件进行安装。
![]()
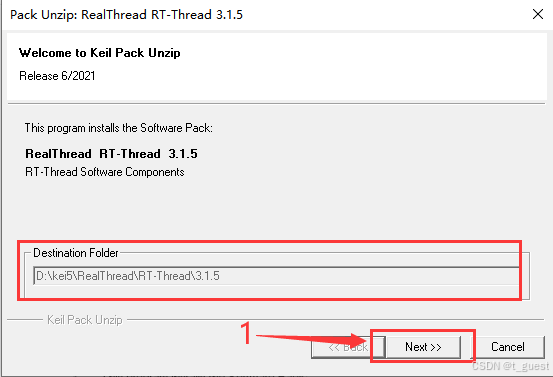
软件会自动找到keil包的路径,直接点击“Next”。
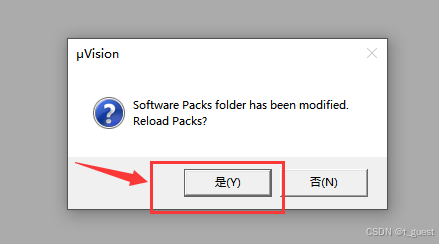
安装完成后,MDK就会提示有新的包,直接点“是”
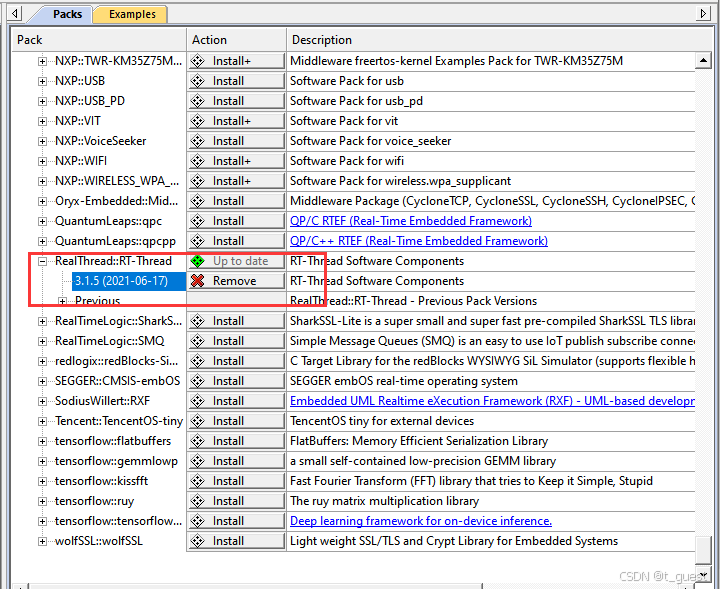
在MDK中打开Pack Installer,确定RTThread-nano是否安装成功。

可以看到,已经安装成功。
3.添加RT-Thread Nano到工程。
打开正常运行的工程,点击Manage Run-Time Environment。
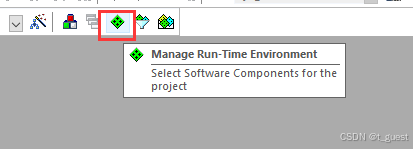
在RTOS中,勾选kernel,然后点击OK,即可完成RT-Thread内核的添加。
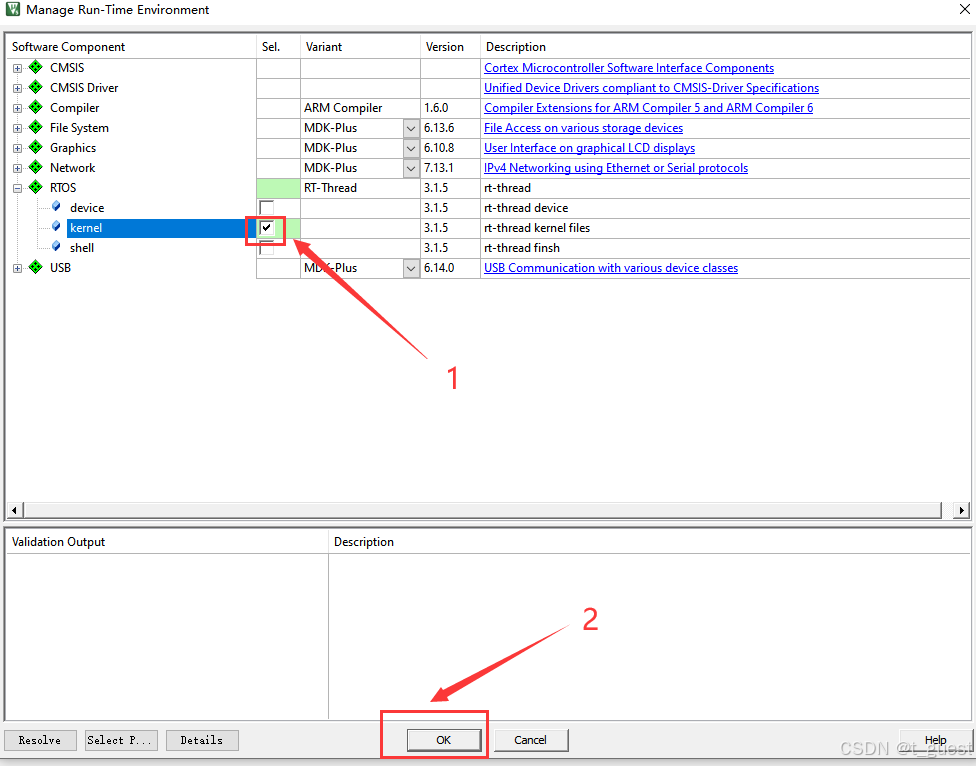
注:因为我们只需要Nano,所以只添加kernel即可。
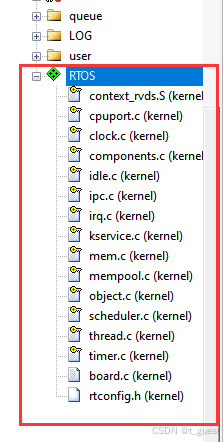
可以看到,在工程文件列表中,已经可以看到RTThread内核相关的文件了。
4.适配RT-Thread Nano
①中断与异常处理
先编译一下工程,如果提示HardFault_Handler(异常处理函数)和PendSV_handler(悬挂处理函数)重复定义,则表示删除原工程中的这两个函数,如果未报错,则不用修改。
因为移植后,RT-Thread已经实现了这两个函数,有可能会与原工程冲突,所以需要处理一下。

②系统时钟配置。
熟悉RTOS的同学都知道,RTOS是需要底层一个tick时钟来提供节拍,rtt-nano也是如此
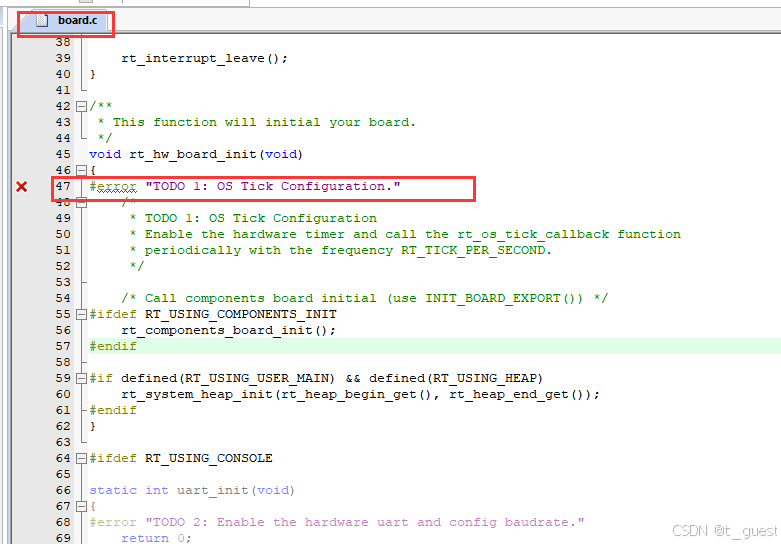
刚才编译的时候报错,就是提示开发者需要在board.c中实现系统时钟配置(为MCU、外设提供工作时钟)与os_tick配置(未操作系统提供心跳/节拍)。
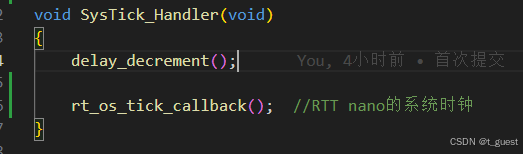
在rt_hw_board_init函数中,初始化MCU的系统时钟。
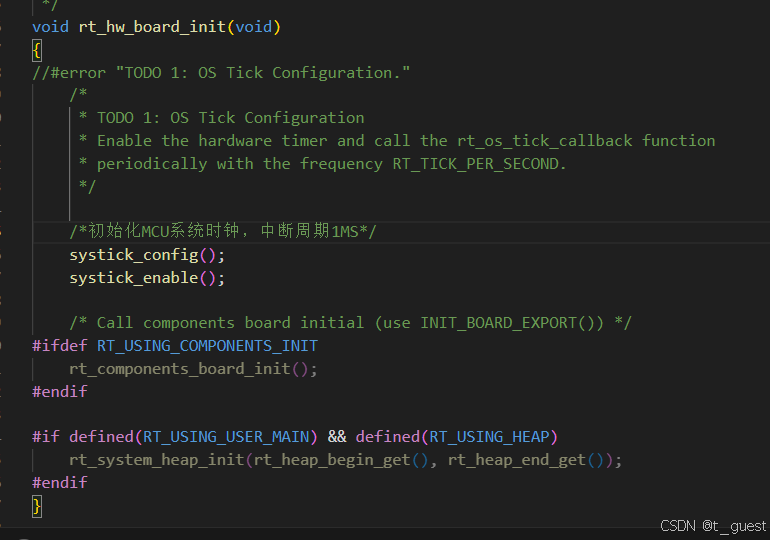
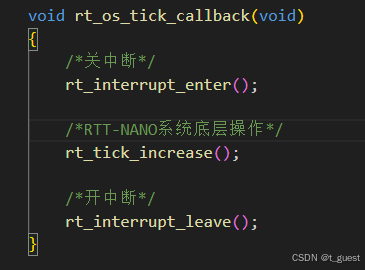
在系统中断中,调用rt_os_tick_callback函数,来为RTT-NANO提供底层节拍。
③内存堆初始化
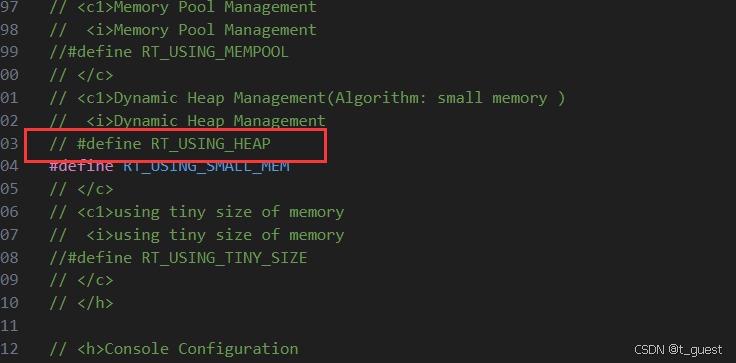
系统内存堆的初始化在board.c中的rt_hw_board_init函数中完成。内存堆功能是否使用取决于宏 RT_USING_HEAP 是否开启,RT-Thread Nano 默认不开启内存堆功能,这样可以保持一个较小的体积,不用为内存堆开辟空间。
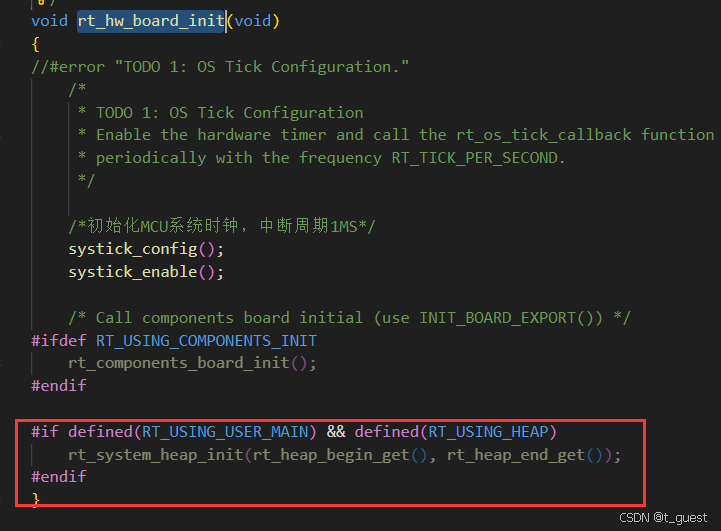
开启系统 heap 将可以使用动态内存功能,如使用 rt_malloc、rt_free 以及各种系统动态创建对象的 API。若需要使用系统内存堆功能,则打开 RT_USING_HEAP 宏定义即可,此时内存堆初始化函数 rt_system_heap_init() 将被调用。
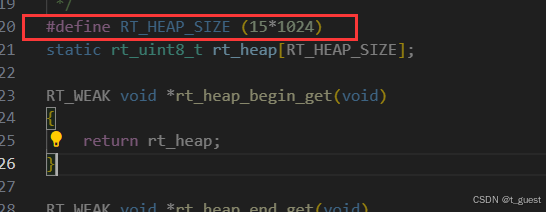
这里可以直接设置堆的大小,根据应用场景进行设置。
如果不需要使用RTT-NANO的堆操作,可以直接在rtconfig.h文件中屏蔽RT_USING_HEAP。屏蔽后,会节省很多空间。
至此,移植完成。
5.测试代码
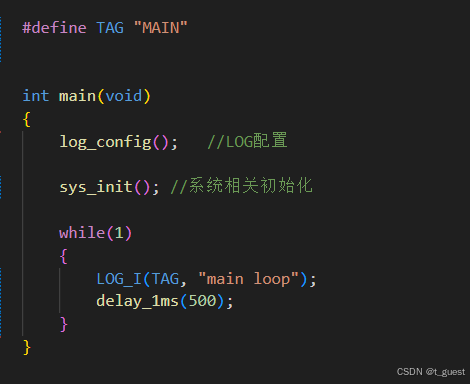
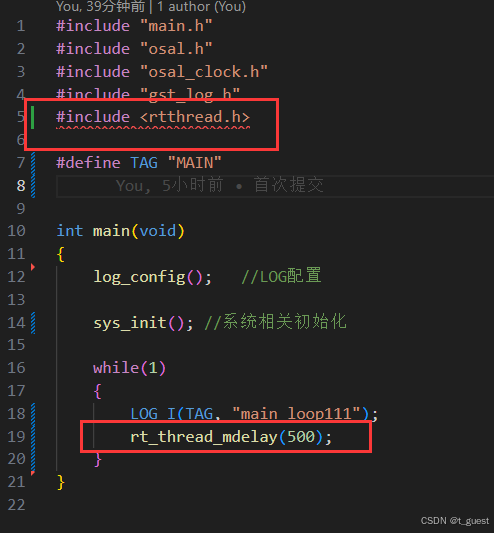
移植完成之后,main函数就转变成一RT-Thread操作系统的一个线程。
在main中添加RTT-nano的头文件<rtthread.h>。修改原来的代码,将delay函数修改为rtt可使用的rt_thread_mdelay函数。
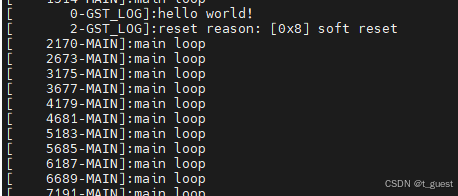
查看运行结果:
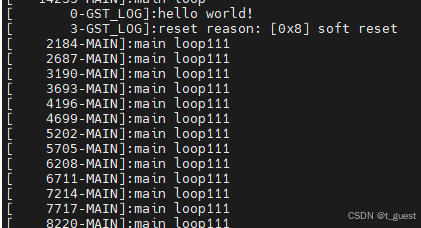
正常运行。
需要注意的是,加入rtt之后,已经是线程工作了,不能使用MCU自带的delay函数来死等,会占用CPU资源,导致其他线程无法运行。
6.配置RT-Thread Nano
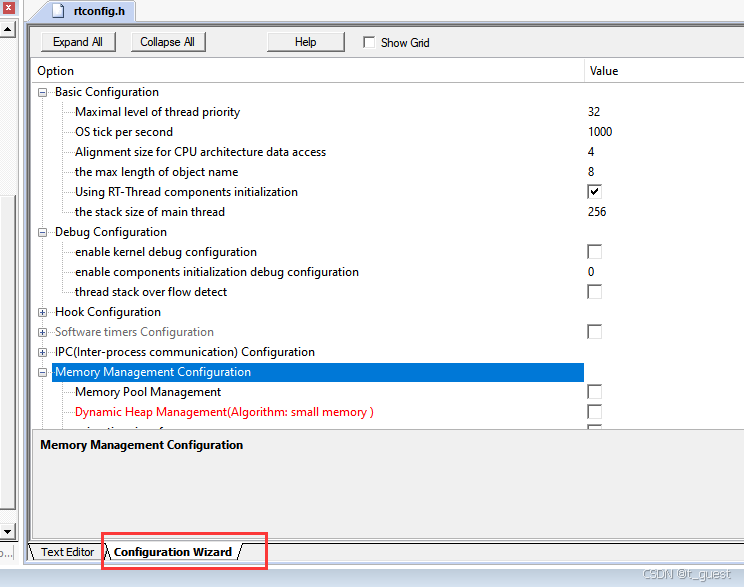
用户可以根据自己的需求通过修改rtconfig,h文件里面的宏定义,来配置相应功能。
如果开启RT_USING_HEAP,创建任务时,则会动态提供内存。如果未开启,则只支持静态方式创建任务、信号量等对象。
MDK提供了配置向导,可以直接勾选参数,来对rtconfig.h文件进行配置。
至此,第一阶段已经完成,后面会通过实例,来介绍RTT-Nano要怎么使用。