当前位置: 首页 > news >正文 【PHPSTORM 使用非挂起断点】 news 2025/11/27 0:56:36 一.PHPSTORM 使用非挂起断点, 不阻碍程序执行, 求值记录会显示在浏览器端 或者存储到文件 查看全文 http://www.mrgr.cn/news/4347.html 相关文章: SpringBootWeb 篇-深入了解 SpringBoot + Vue 的前后端分离项目部署上线与 Nginx 配置文件结构 echo “Hello, UDP!“ | nc -u -w1 192.168.1.100 1234 里面有换行符 微前端架构下的性能优化:模块化开发与服务网格的协同 通过https方式访问内网IP Centos安装Jenkins教程详解版(JDK8+Jenkins2.346.1) 深入浅出:理解TCP传输控制协议的核心概念 使用SQLite进行Python简单数据存储的线程安全解决方案 【JAVA多线程】CompletableFuture原理剖析 谷歌云AI新作:CROME,跨模态适配器高效多模态大语言模型 [godot] 采用状态机时,如何处理攻击时移动?如“冲撞” 【vue3】组件通信 【大模型理论篇】关于LLaMA 3.1 405B以及小模型的崛起 Nginx: 配置项之server_name指令用法梳理 什么是零拷贝?以及数据在内存中的流动途径 手撕⼆叉树——堆 (2024)vue2+vue3学习笔记(持续更新) 【精选】基于Python大型购物商城系统(京东购物商城,淘宝购物商城,拼多多购物商城爬虫系统) H5,防止 h5 无限 debugger 转转系统源码开发 关于NetTopologySuite这个C#库的学习
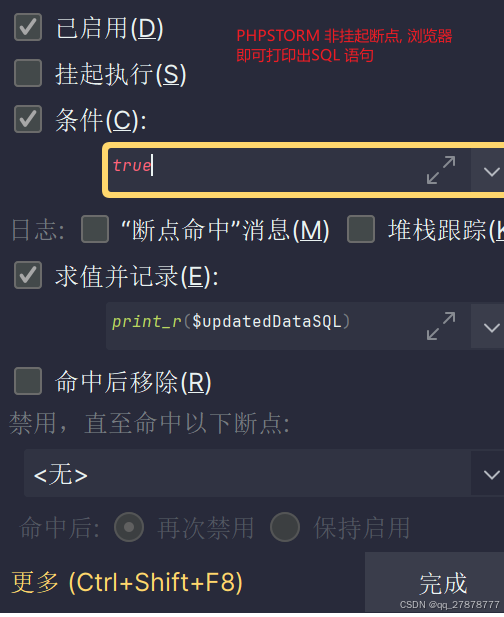
一.PHPSTORM 使用非挂起断点, 不阻碍程序执行, 求值记录会显示在浏览器端 或者存储到文件 查看全文 http://www.mrgr.cn/news/4347.html 相关文章: SpringBootWeb 篇-深入了解 SpringBoot + Vue 的前后端分离项目部署上线与 Nginx 配置文件结构 echo “Hello, UDP!“ | nc -u -w1 192.168.1.100 1234 里面有换行符 微前端架构下的性能优化:模块化开发与服务网格的协同 通过https方式访问内网IP Centos安装Jenkins教程详解版(JDK8+Jenkins2.346.1) 深入浅出:理解TCP传输控制协议的核心概念 使用SQLite进行Python简单数据存储的线程安全解决方案 【JAVA多线程】CompletableFuture原理剖析 谷歌云AI新作:CROME,跨模态适配器高效多模态大语言模型 [godot] 采用状态机时,如何处理攻击时移动?如“冲撞” 【vue3】组件通信 【大模型理论篇】关于LLaMA 3.1 405B以及小模型的崛起 Nginx: 配置项之server_name指令用法梳理 什么是零拷贝?以及数据在内存中的流动途径 手撕⼆叉树——堆 (2024)vue2+vue3学习笔记(持续更新) 【精选】基于Python大型购物商城系统(京东购物商城,淘宝购物商城,拼多多购物商城爬虫系统) H5,防止 h5 无限 debugger 转转系统源码开发 关于NetTopologySuite这个C#库的学习