【启扬方案】基于RK3588的割草机器人应用解决方案
割草机器人是一种自动化的草坪维护设备,通过集成环境感知、路径规划和行为控制等功能,且通过APP端远程遥控机器人在草坪上建立虚拟边界,实现智能且自动化的草坪修剪工作。

图片来源于网络
割草机器人的核心在于算法,尤其是精准定位和障碍物识别,精准的定位可优化割草路线,避免重复割草和覆盖不完全的情况;对静态和动态障碍物的识别可实现有效避障,提升割草效率和保障产品安全。
启扬方案推荐
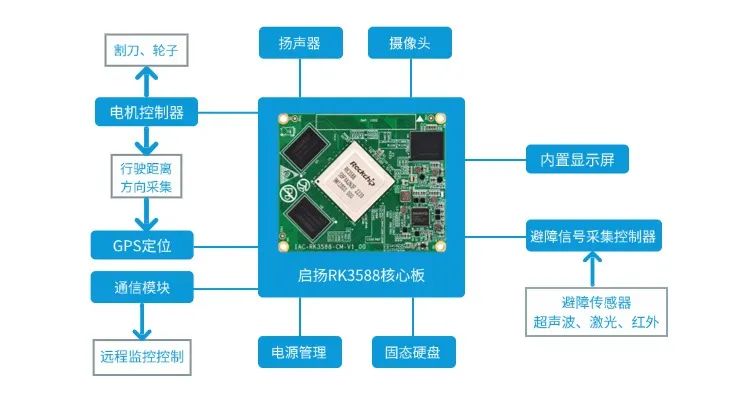
启扬RK3588核心板基于RK3588处理器,集成GPU、NPU、VPU、ISP等计算核心,为割草机器人在机器视觉、机器学习、模型推理应用上提供足够的性能支持;同时,割草机器人作为一个综合性的系统,核心板提供丰富的接口选项,能够满足设备多种功能的实现。
处理器采用四核Cortex-A76和四核Cortex-A55架构,8mn制程工艺,主频高达2.4GHz,可执行复杂的数据处理和算法运算,同时处理多个任务(如:环境感知、路径规划、用户界面更新);内置6TOPS NPU、多种深度学习AI框架,利于更新和部署算法模型,适应不断变化的使用场景和需求;支持Mali-G610 GPU,适用于高负载图像处理,可用于实时机器视觉和图像识别,割草机器人能够精准识别草坪边界和障碍物。
核心板具备48M ISP,支持HDR、3DNR、2DNR、锐化、去雾、崎变校正、宽动态对比度增强等功能,有效解决各种光照环境下的成像效果;支持四路摄像头同时输入,允许割草机器人从不同角度和位置获取环境信息,实现360度全方位感知,环视摄像头除了用于导航,还可作为安防监控,记录割草机器人工作过程;支持8K VPU,提供高分辨率视频编解码,全面提升视觉导航和环境感知能力。
核心板拥有丰富的接口资源,如MIPI_DSI、HDMI、eDP、DP多种显示接口,满足割草机器人内置显示的需要;MIPI_CSI、M.2、PCIe、USB、UART、GPIO等接口,连接摄像头、传感器、运动控制以及存储等必要的模块,支持4/5G模块、蓝牙模块,可为割草机器人提供无线网络连接,实现远程控制和数据同步。
割草机器人置于户外的工作环境,需具备耐高温、抗严寒、防淋雨等特性,核心板采用工业级电子元器件,支持工业级温宽-40℃ ~ +85℃,满足严苛环境下的作业需求。