OpenGL笔记二十之深度检测概念
OpenGL笔记二十之深度检测概念
—— 2024-08-25 晚上
bilibili赵新政老师的教程看后笔记
code review!
文章目录
- OpenGL笔记二十之深度检测概念
- 1.课程PPT截图
- 2.运行
- 3.代码
1.课程PPT截图
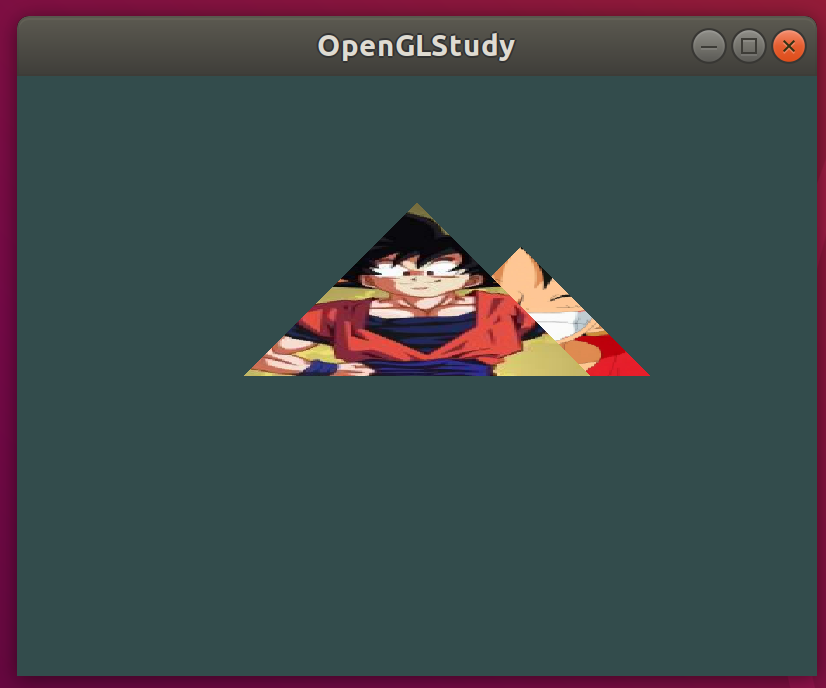
2.运行
3.代码
关键部分

main.cpp
#include <iostream>#include "glframework/core.h"
#include "glframework/shader.h"
#include <string>
#include <assert.h>//断言
#include "wrapper/checkError.h"
#include "application/Application.h"
#include "glframework/texture.h"/*
*┌────────────────────────────────────────────────┐
*│ 目 标: 学习使用深度测试功能
*│ 讲 师: 赵新政(Carma Zhao)
*│ 拆分目标:
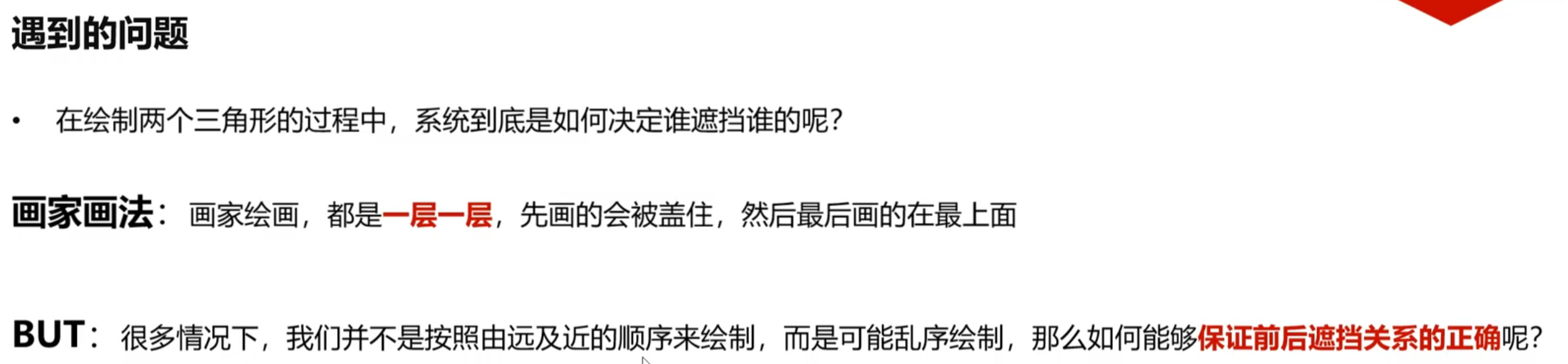
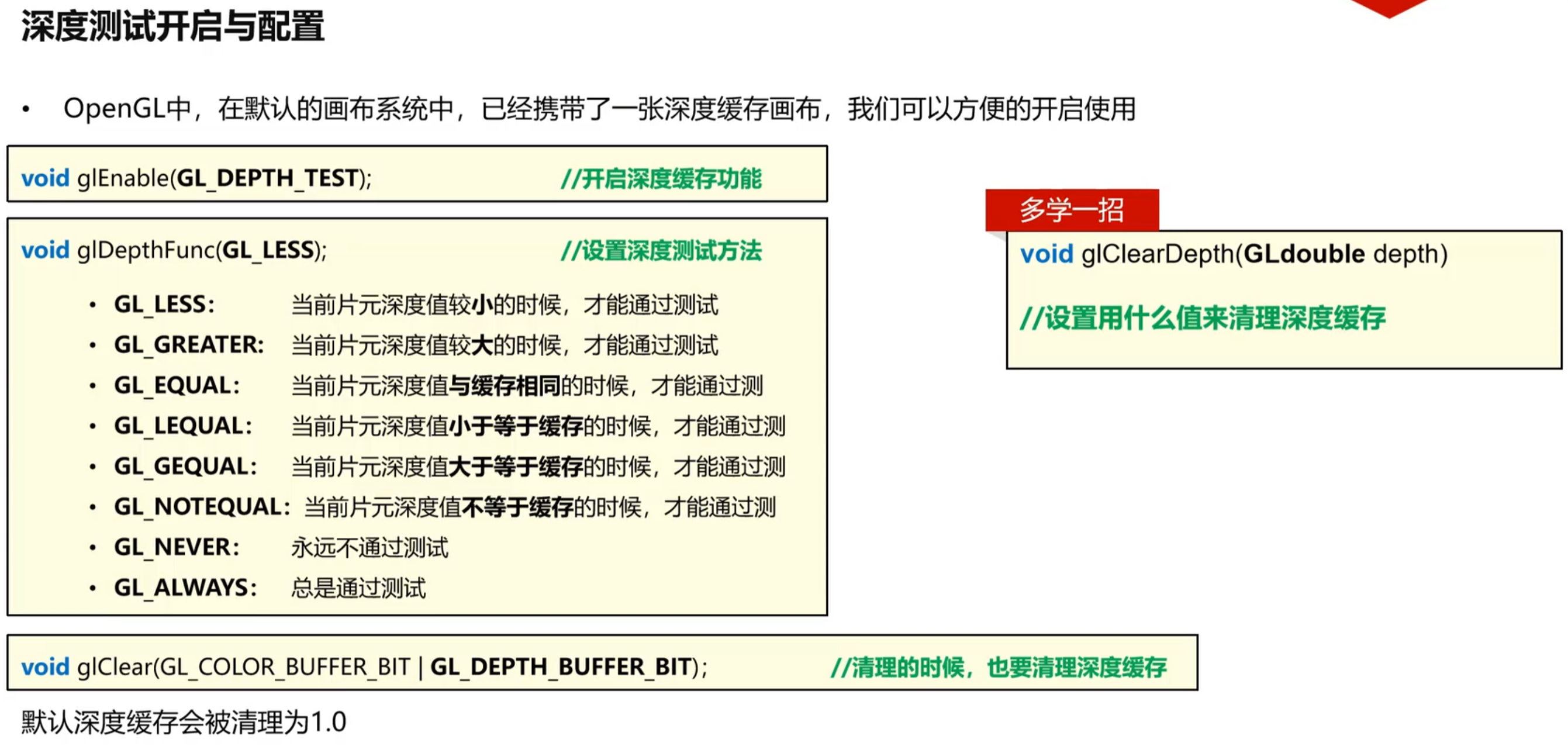
* -1 演示为什么需要深度检测-2 演示OpenGL深度检测的使用 2.1 glEnable深度检测2.2 glDepthFunc设置深度检测的算法2.3 在glClear里面清理深度缓存的数据
*
*└────────────────────────────────────────────────┘
*/GLuint vao;
Shader* shader = nullptr;glm::mat4 transformGoku(1.0f);
glm::mat4 transformLuffy(1.0f);Texture* textureGoku = nullptr;
Texture* textureLuffy = nullptr;glm::mat4 viewMatrix(1.0f);
glm::mat4 perspectiveMatrix(1.0f);void OnResize(int width, int height) {GL_CALL(glViewport(0, 0, width, height));std::cout << "OnResize" << std::endl;
}void OnKey(int key, int action, int mods) {std::cout << key << std::endl;
}void prepareVAO() {float positions[] = {-1.0f, 0.0f, 0.0f,1.0f, 0.0f, 0.0f,0.0f, 1.0f, 0.0f,};float colors[] = {1.0f, 0.0f,0.0f,0.0f, 1.0f,0.0f,0.0f, 0.0f,1.0f,};float uvs[] = {0.0f, 0.0f,1.0f, 0.0f,0.5f, 1.0f,};unsigned int indices[] = {0, 1, 2,};//2 VBO创建GLuint posVbo, colorVbo, uvVbo;glGenBuffers(1, &posVbo);glBindBuffer(GL_ARRAY_BUFFER, posVbo);glBufferData(GL_ARRAY_BUFFER, sizeof(positions), positions, GL_STATIC_DRAW);glGenBuffers(1, &colorVbo);glBindBuffer(GL_ARRAY_BUFFER, colorVbo);glBufferData(GL_ARRAY_BUFFER, sizeof(colors), colors, GL_STATIC_DRAW);glGenBuffers(1, &uvVbo);glBindBuffer(GL_ARRAY_BUFFER, uvVbo);glBufferData(GL_ARRAY_BUFFER, sizeof(uvs), uvs, GL_STATIC_DRAW);//3 EBO创建GLuint ebo;glGenBuffers(1, &ebo);glBindBuffer(GL_ELEMENT_ARRAY_BUFFER, ebo);glBufferData(GL_ELEMENT_ARRAY_BUFFER, sizeof(indices), indices, GL_STATIC_DRAW);//4 VAO创建glGenVertexArrays(1, &vao);glBindVertexArray(vao);//5 绑定vbo ebo 加入属性描述信息//5.1 加入位置属性描述信息glBindBuffer(GL_ARRAY_BUFFER, posVbo);glEnableVertexAttribArray(0);glVertexAttribPointer(0, 3, GL_FLOAT, GL_FALSE, sizeof(float) * 3, (void*)0);//5.2 加入颜色属性描述数据glBindBuffer(GL_ARRAY_BUFFER, colorVbo);glEnableVertexAttribArray(1);glVertexAttribPointer(1, 3, GL_FLOAT, GL_FALSE, sizeof(float) * 3, (void*)0);//5.3 加入uv属性描述数据glBindBuffer(GL_ARRAY_BUFFER, uvVbo);glEnableVertexAttribArray(2);glVertexAttribPointer(2, 2, GL_FLOAT, GL_FALSE, sizeof(float) * 2, (void*)0);//5.4 加入ebo到当前的vaoglBindBuffer(GL_ELEMENT_ARRAY_BUFFER, ebo);glBindVertexArray(0);
}void prepareShader() {shader = new Shader("assets/shaders/vertex.glsl","assets/shaders/fragment.glsl");
}void prepareTexture() {textureGoku = new Texture("assets/textures/goku.jpg", 0);textureLuffy = new Texture("assets/textures/luffy.jpg", 0);
}void prepareCamera() {//lookat:生成一个viewMatrix//eye:当前摄像机所在的位置//center:当前摄像机看向的那个点//up:穹顶向量viewMatrix = glm::lookAt(glm::vec3(0.0f,0.0f,3.0f),glm::vec3(0.0f,0.0f,0.0f),glm::vec3(0.0f,1.0f,0.0f));
}void preparePerspective() {//fovy:y轴方向的视张角,弧度单位//aspect:近平面的横纵百分比//near:近平面距离//far:远平面距离perspectiveMatrix = glm::perspective(glm::radians(60.0f), (float)app->getWidth() / (float)app->getHeight(), 0.1f, 1000.0f);
}void prepareState() {glEnable(GL_DEPTH_TEST);glDepthFunc(GL_LESS);
// glClearDepth(0.0f);
}void render() {//执行opengl画布清理操作GL_CALL(glClear(GL_COLOR_BUFFER_BIT | GL_DEPTH_BUFFER_BIT));//绑定当前的programshader->begin();shader->setInt("sampler", 0);shader->setMatrix4x4("transform", transformGoku);shader->setMatrix4x4("viewMatrix", viewMatrix);shader->setMatrix4x4("projectionMatrix", perspectiveMatrix);textureGoku->bind();//绑定当前的vaoGL_CALL(glBindVertexArray(vao));//第一次绘制GL_CALL(glDrawElements(GL_TRIANGLES, 3, GL_UNSIGNED_INT, 0));//第二次绘制textureLuffy->bind();transformLuffy = glm::translate(glm::mat4(1.0f), glm::vec3(0.8f, 0.0f, -1.0f));shader->setMatrix4x4("transform", transformLuffy);GL_CALL(glDrawElements(GL_TRIANGLES, 3, GL_UNSIGNED_INT, 0));GL_CALL(glBindVertexArray(0));shader->end();
}int main() {if (!app->init(800, 600)) {return -1;}app->setResizeCallback(OnResize);app->setKeyBoardCallback(OnKey);//设置opengl视口以及清理颜色GL_CALL(glViewport(0, 0, 800, 600));GL_CALL(glClearColor(0.2f, 0.3f, 0.3f, 1.0f));prepareShader();prepareVAO();prepareTexture();prepareCamera();preparePerspective();prepareState();while (app->update()) {render();}app->destroy();return 0;
}